ZeusCarは、SunFounder社が販売するArduino Uno R3互換ボードで制御するスマートカーです。
このロボットカーは4WD全方向性駆動が可能なメカナムホイールを装着しています。
また、ZeusCarに搭載されるセンサー、アクチュエーターにアクセスするためのソフトウェアライブラリが用意されており、ユーザーがプログラミングにより制御することができます。
メーカーから提供されるチュートリアルも、日本語で用意されており、動画での解説も充実しています。これからマイコンのプログラミングに挑戦してみたいと思っている方に最適な製品です。

今回はこのZeusCarの組み立てから操作方法までを詳細に解説しますので、ぜひ参考にしてみてください。
- ZeusCarの概要と特徴
- ZeusCarの入手先
- ZeusCarの組み立てと操作方法
本記事は製品をSunFounder様よりご提供頂き作成しています。
Zeus Carとは

Zeus CarはArduino UNOをコントローラとして動作するロボットキットです。
- メカナムホイールと多数のセンサーを装着した本格的ロボット
- はんだ付け不要で組み立てが簡単(工具も同梱)
- 組み立て後、リモコンやスマホアプリですぐに動かせる
- Arduinoで制御できる(ユーザーがプログラミング可能)ため、プログラミング入門に最適
- 15000円前後と安価
車輪にはメカナムホイールを採用しており、通常の車両では不可能な真横や斜め方向への移動が可能です。
ZeusCarは多機能プログラミングを体験できるオールインワンのキットで、障害物回避、ライン追跡、IRリモートコントロール、顔認識、ジェスチャーと音声認識など、さまざまなセンサーが搭載されています。
また、Arduino UNOで動作するプログラムをユーザーがコーディングして実装することができるため、自立制御のプログラミングを学ぶのにも最適な製品です。
Zeus Carの入手先
SunFounder社公式サイト
Zeus Carは開発元のSunFounder社公式のショッピングサイトで購入することが可能です。
こちらのサイトで注文すると、日本にも発送してもらえます。
Amazon
Zeus Carはアマゾンで購入可能です。
2023年9月現在、日本円で15000円前後で販売されていますが、Arduino本体が含まれていることと、多数のセンサーが含まれていますので、驚異的な価格設定です。
公式ドキュメント
Zeus Carに関する公式ドキュメントは以下の通りです。
Zeus Carのハードウェア
Zeus Carの外観
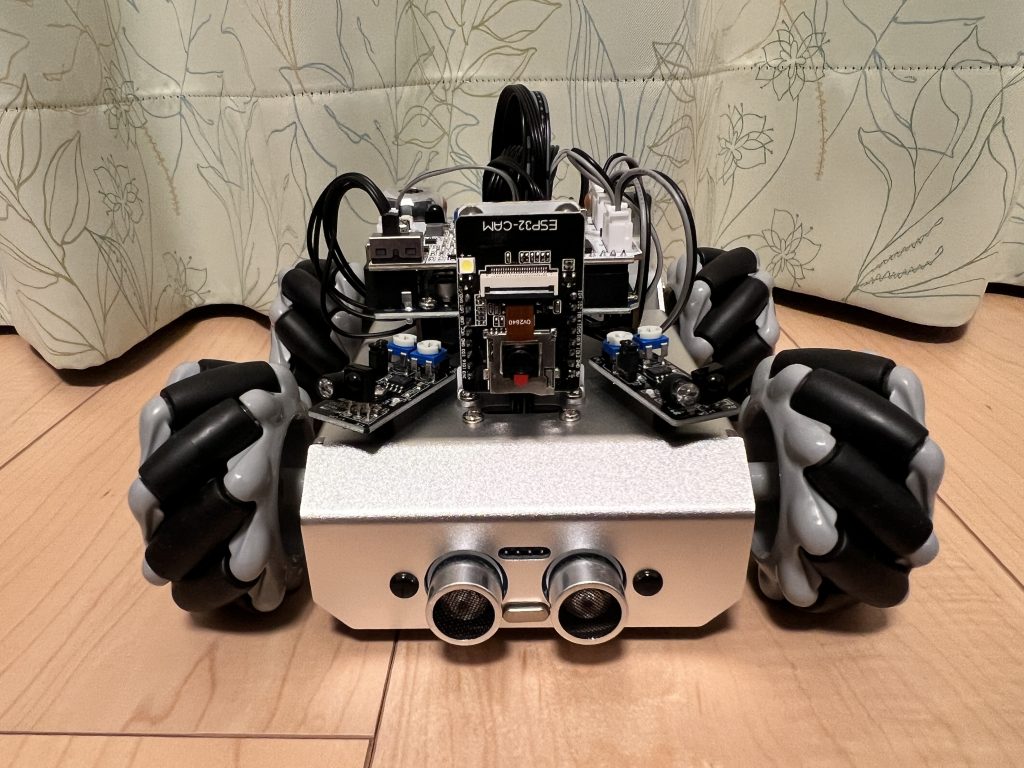
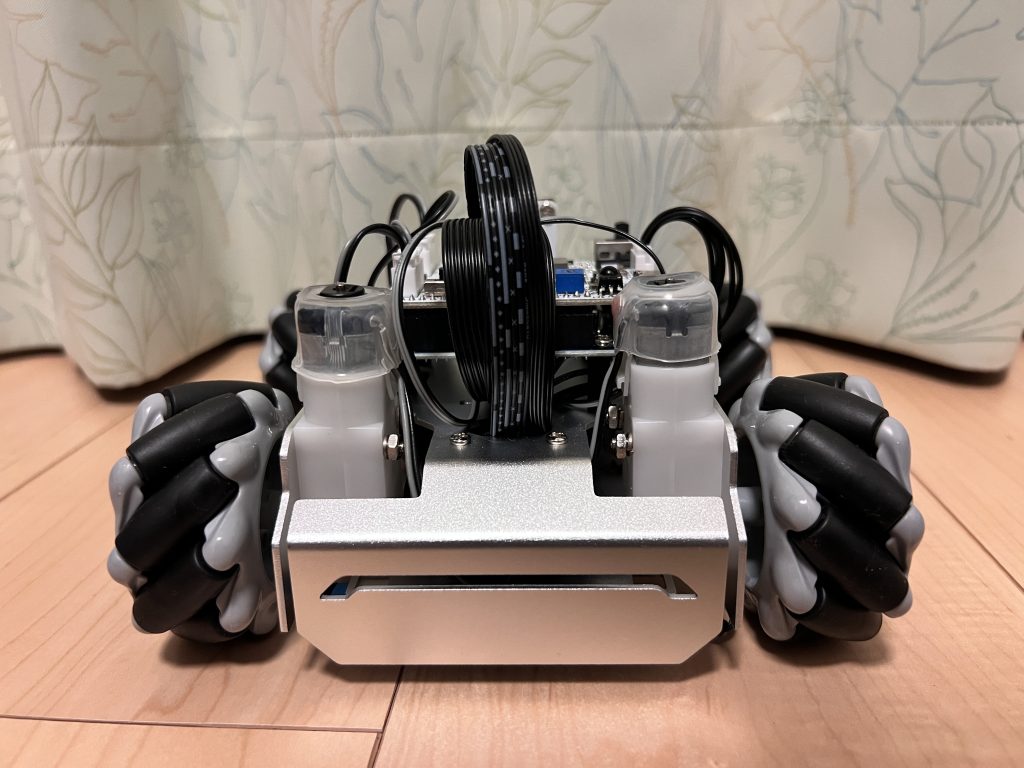
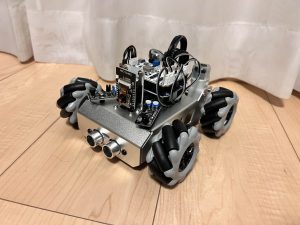
こちらがZeusCarの正面からの写真です。
フロント部分には各種センサーが搭載されています。その後ろにはコントローラのArduinoが搭載されています。
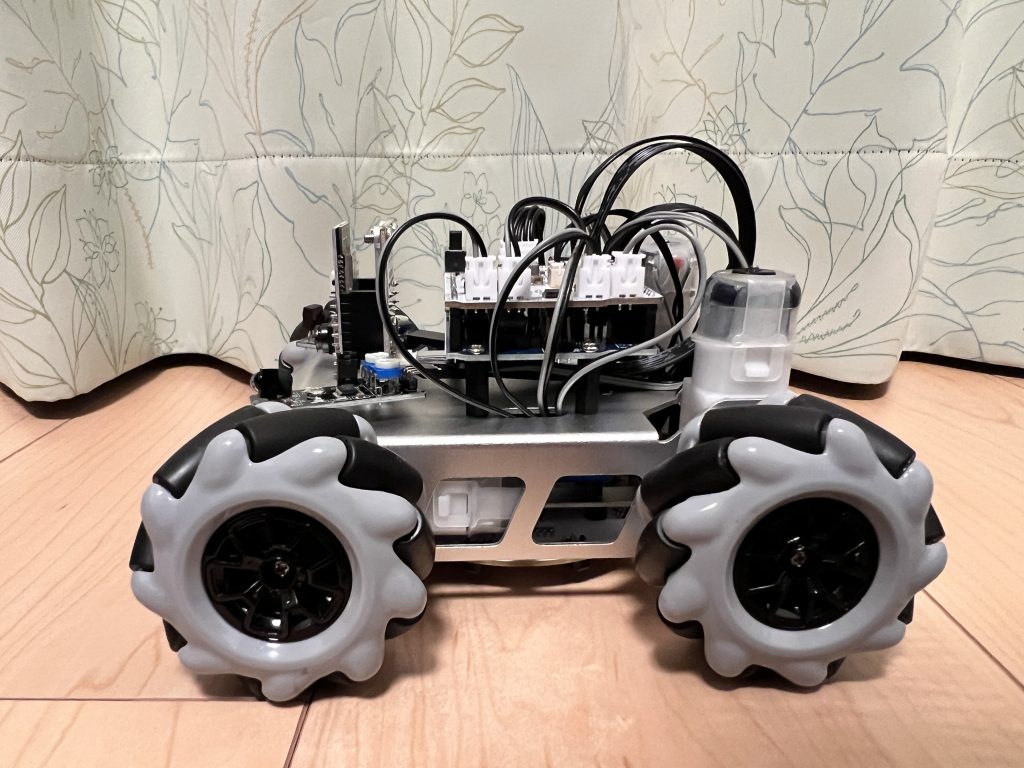
ZeusCar左側面の画像です。
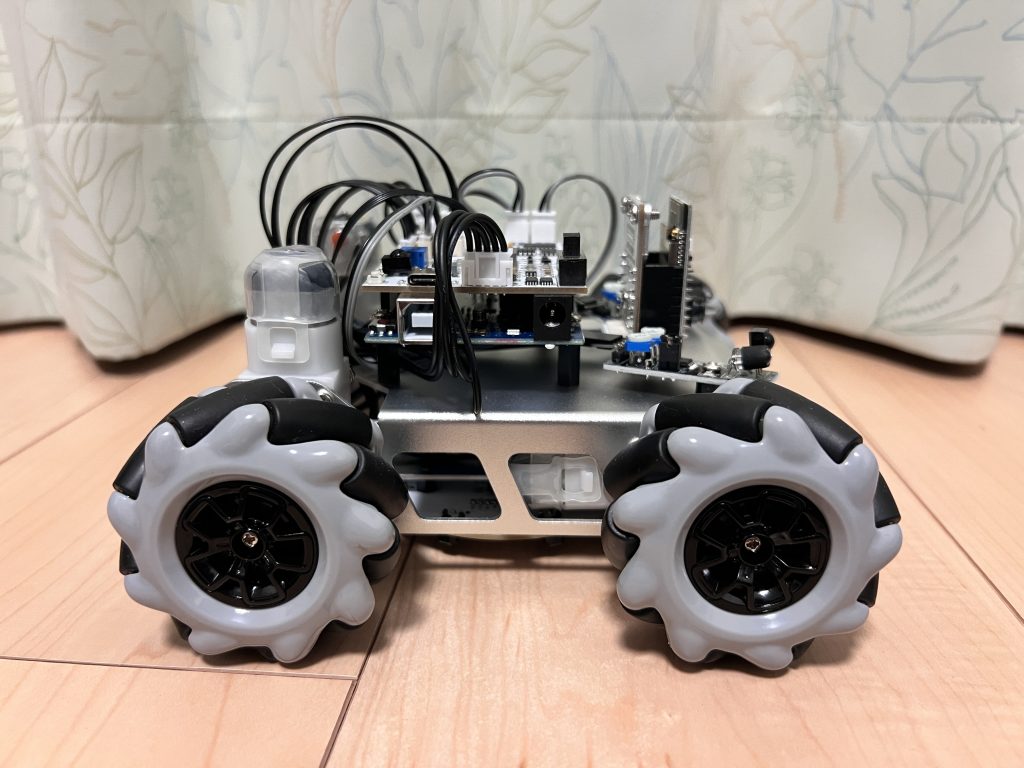
ZeusCar右側面の画像です。
電源コネクタとArduinoにプログラムを書き込むためのUSBコネクタがあります。
ZeusCar背面の写真です。
Zeus Carに搭載されるセンサー
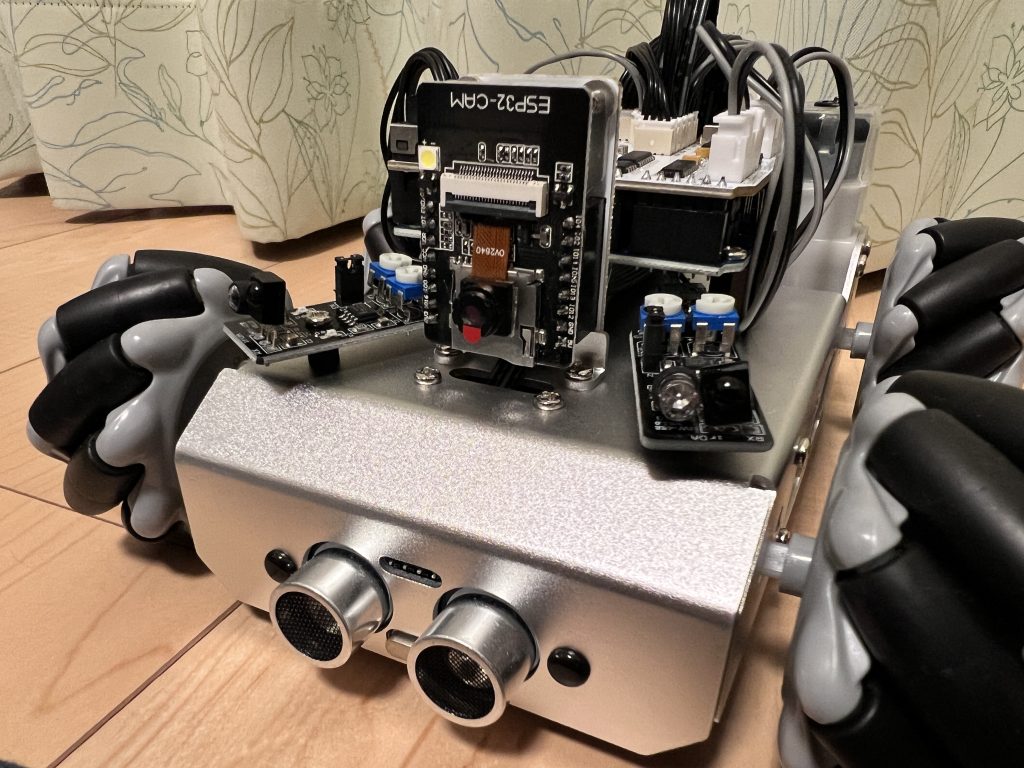
ZeusCarフロント部分にはセンサー類が多数搭載されています。
本体前面に4つ、底面に1つの計5つのセンサーを搭載。
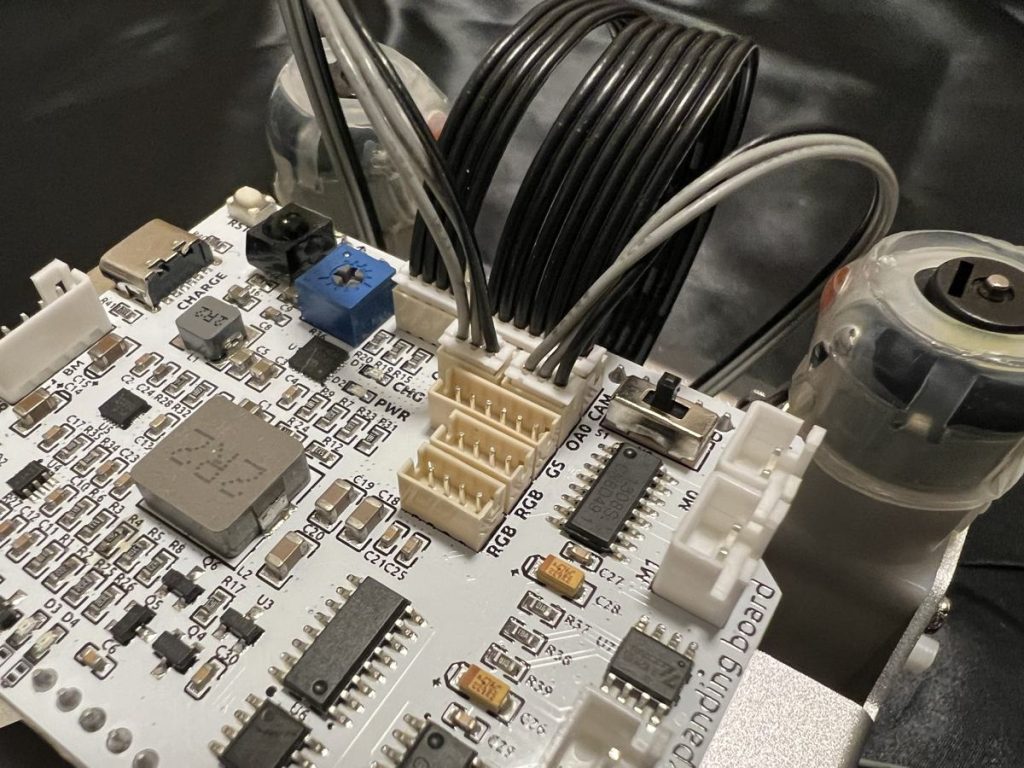
上段中央のEPS32-CAMと書かれている基板に実装されているのが、カメラとそれを制御するマイコンEPS32を搭載したモジュールです。このEPS32でカメラの映像をスマホのアプリケーションにリアルタイムに転送します。
EPS32-CAMの両サイドに斜めに取り付けられているのが、KY-032距離センサーです。赤外線で斜め方向の障害物までの距離を計測します。
下段中央に取り付けられているのが、HC-SR04距離センサーです。超音波で正面方向の障害物までの距離を計測します。
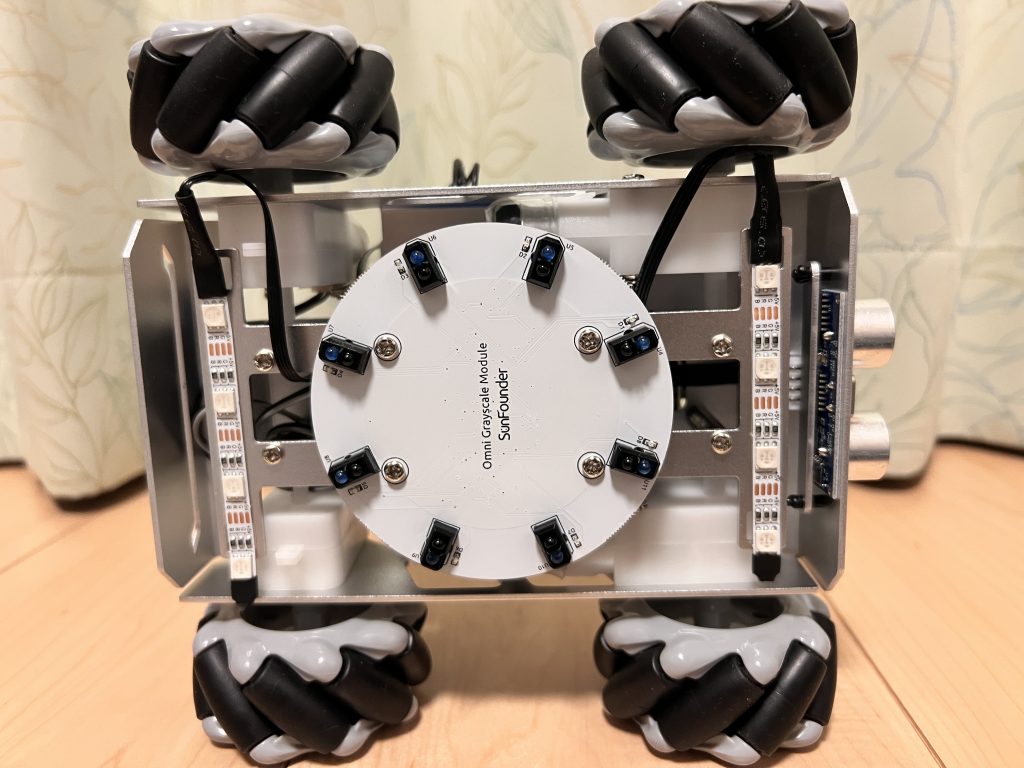
車体底面にはライントレース用のセンサーが取り付けられています。このセンサーで地面に描かれている走行ラインを検出してトレースします。
Zeus Carの駆動部
車輪のメカナムホイールです。メカナムホイールの機構により、車体の向きを変えずに全方向に移動することが可能です。
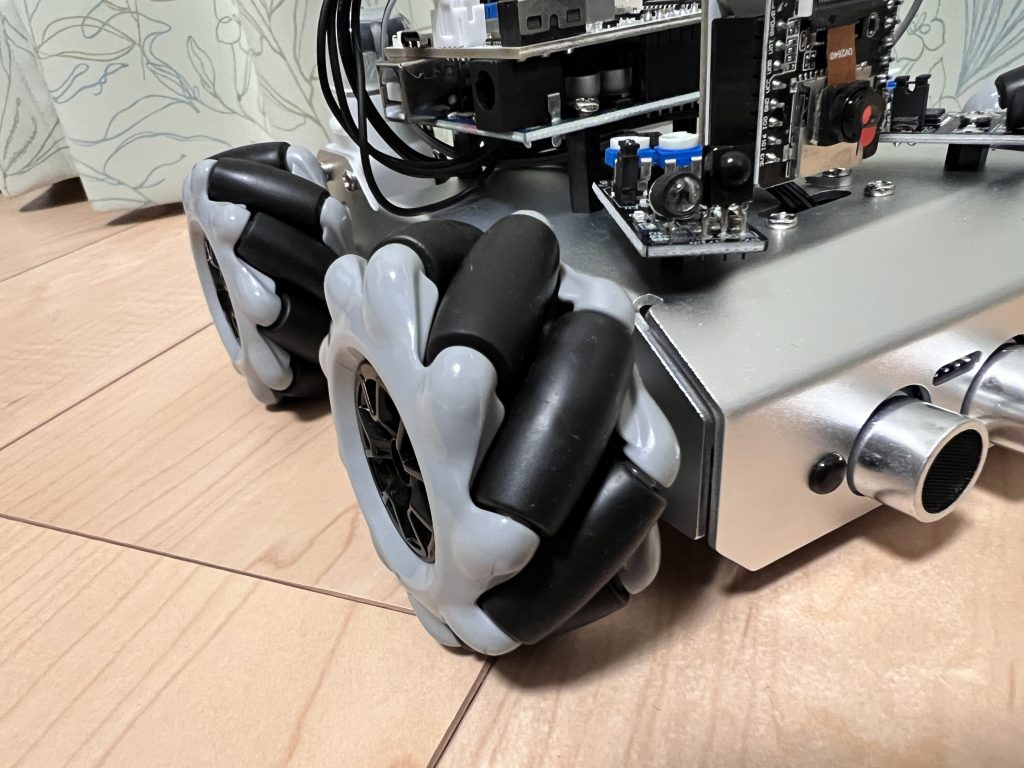
メカナムホイールを駆動するためのDCモーターとギアボックスがセットになったユニットです。各車輪に一つずつ、計4個搭載されています。

ZeusCarの組み立てが簡単
ZeusCarは非常にシンプルな構成で、機械が苦手な人でも問題なく組み立てられます。
初心者でも1時間以内で組み立て可能。
必要な工具は全て製品に同梱されているため、ドライバーセットなど工具を別途用意する必要がありません。

また、はんだ付けも不要で、説明書を見ながらケーブルをコネクタを差し込んでいくだけで回路の配線が完了します。
電気回路の知識も一切不要。
ZeusCarの組み立て方法については、以下の記事で詳細を解説しています。
組み立て後、すぐ動かせる
Zeus Carをコントロールする方法は、付属のリモコン、スマホアプリ、プログラミングの3つの方法で可能です。
このうち、付属のリモコンとスマホアプリは組み立て後にすぐ使用することができます。
リモコンでの操作
ZeusCarには以下のようなリモコンが用意されており、本体を組み立て後に電源をいれるだけですぐにリモコンでコントロールすることができます。

ソフトウェアのインストールなどは不要ですぐに操作できる。
ラジコン感覚で、ロボット動作やセンサーの機能などを確認することができます。
Zeus Carを付属のリモコンで操作するする方法について、以下の記事で解説しています。

スマホアプリでの操作
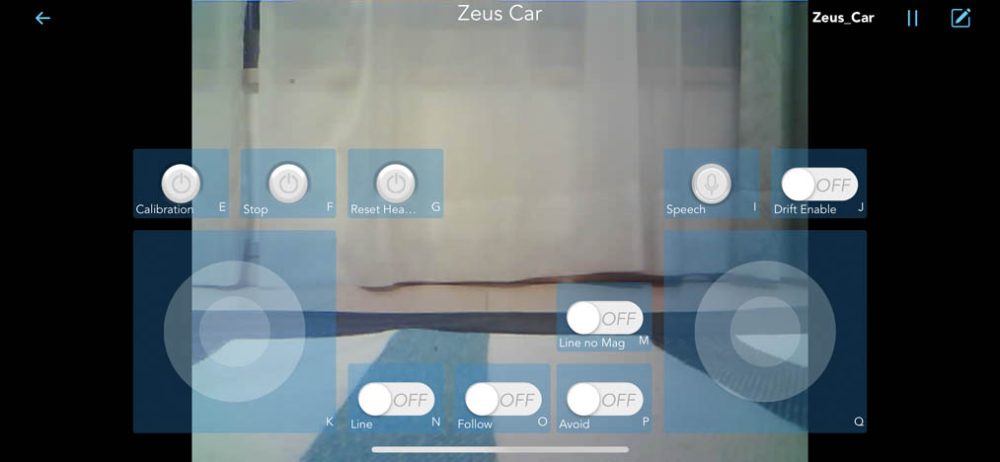
ZeusCarはAppstore、またはGoogle Playで配信されているSunFounder Controllerをインストールすることで、スマホからコントロールすることができます。
無料の専用アプリでラジコンのように操作可能。
「SunFounder」のキーワードで検索すると以下のようにアプリが見つかりますので、スマホにインストールします。

WifiでZeusCarと接続するだけで、ZeusCarのカメラの映像がリアルタイムにスマホに送信され、FPSのような主観視点でゲーム感覚でロボットを操作できます。
Zeus CarをスマホアプリSunFounder Controllerで操作する方法について、以下の記事で解説しています。

プログラミングによる制御
ZeusCarの最大の特徴は、コントローラにArduino Uno3互換ボードを使用しており、ユーザーが動作をプログラミングすることができます。
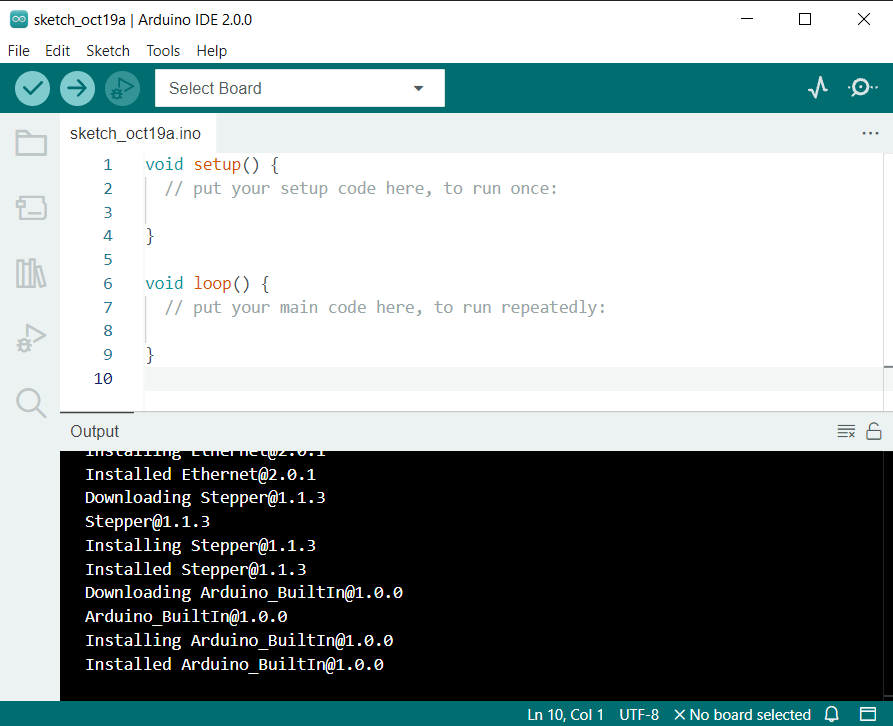
ZeusCarに搭載される各種センサーやモーターに対応したソフトウェアライブラリが用意されており、自分が書いたプログラムからライブラリにアクセスすることにより、自在に制御することができます。
これから組み込みプログラミングを始めたい方に最適。

カメラを使った画像処理や、赤外線、超音波を使った距離センサーでの物体検出などをプログラミングしながら学ぶことができます。
ソフトウェアライブラリに関するドキュメント
各種ライブラリの使用方法は、以下の公式ページで解説されています。
まとめ
今回はArduinoで制御するスマートカー、ZeusCarについて解説しました。
初心者でもスムーズにプロジェクトを完成させることができるように、SunFounder公式からも簡単に理解できるオンラインチュートリアルと解説動画が用意されています。
組み込み初心者の方にとっては、ロボット制御入門にも最適な製品ですので、ぜひ挑戦してみてください。
また、SunFounderから発売されているスパイダーロボット PiCrawlerについても以下の記事で解説していますので、あわせてご覧ください。
それでは、また次の記事でお会いしましょう。




コメント