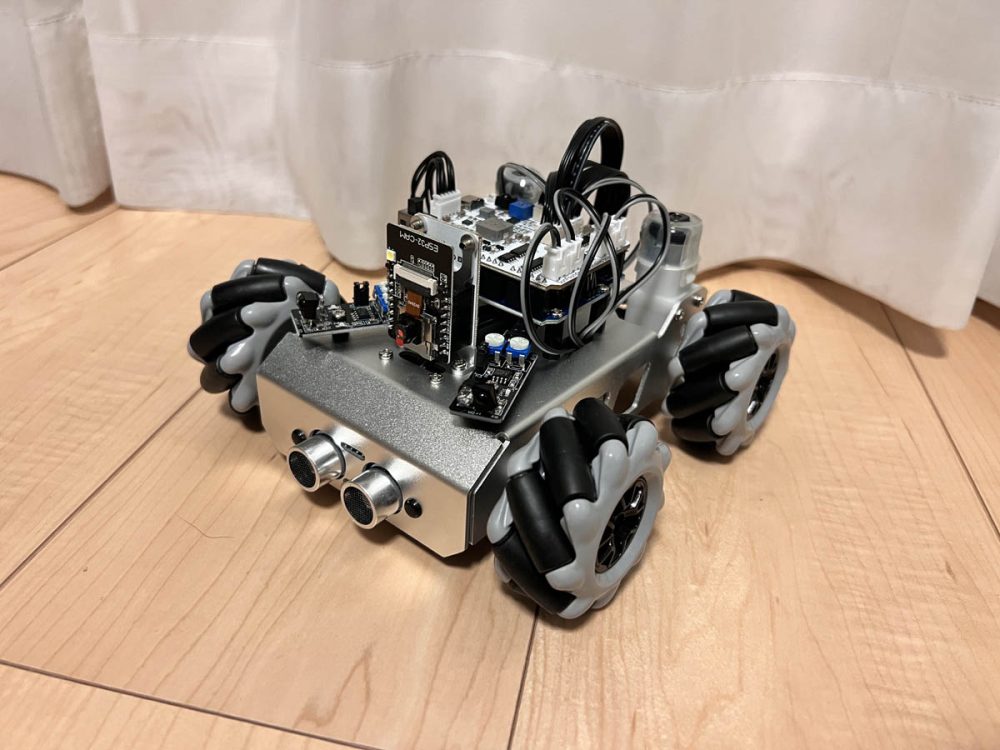
今回は、SunFounder製のArduinoを搭載したロボットカー「Zeus Car」の組み立てについて解説します。
この製品は組み立てが簡単で、様々なセンサーを搭載しています。また、ユーザーがプログラミング可能であるため、ロボットの自立制御などを学びたい方には特におすすめです。
組み立てに必要な工具もすべて同梱されており、素人でも1時間程度で作成可能。
組み立ての工程を写真付きで紹介しますので、参考にしてみてください。
- Zeus Carのパッケージ内容
- Zeus Carの組み立て手順
- Zeus Carの入手先
Zeus Carとは

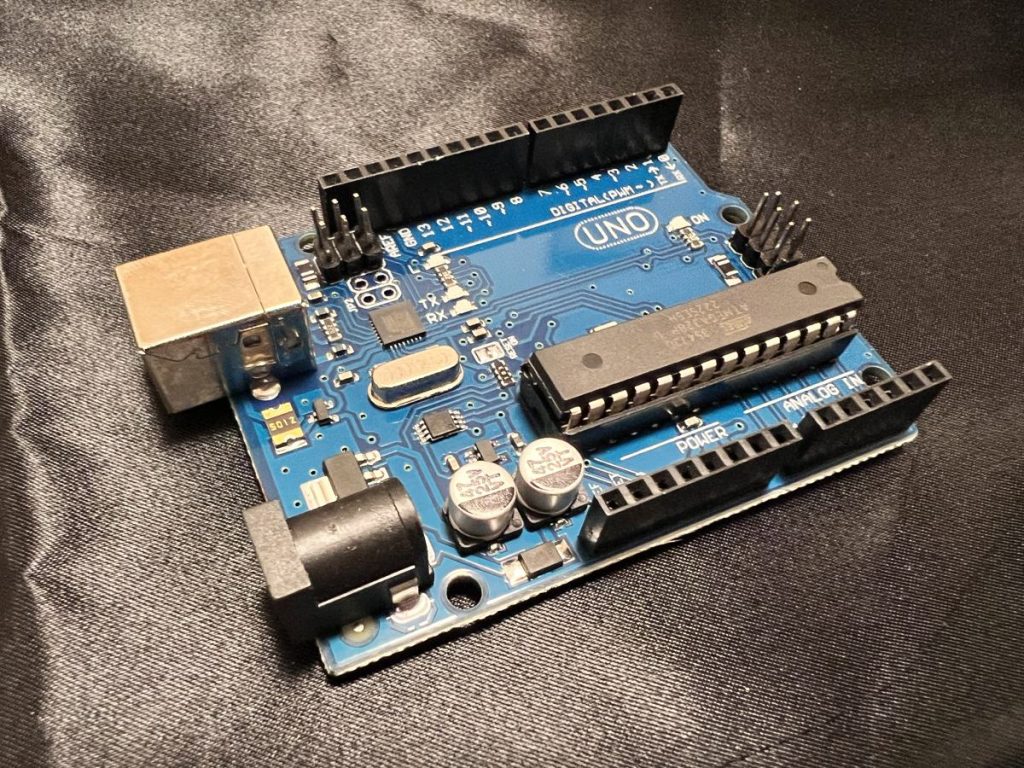
Zeus CarはArduino UNOをコントローラとして動作するロボットキットです。
車輪にはメカナムホイールを採用しており、通常の車両では不可能な真横や斜め方向への移動が可能です。
ZeusCarは多機能プログラミングを体験できるオールインワンのキットで、障害物回避、ライン追跡、IRリモートコントロール、顔認識、ジェスチャーと音声認識など、さまざまなセンサーが搭載されています。
また、Arduino UNOで動作するプログラムをユーザーがコーディングして実装することができるため、自立制御のプログラミングを学ぶのにも最適な製品です。
ZeusCarに関する情報を以下の記事でまとめていますので、こちらもあわせてご覧ください。

本記事は製品をSunFounder様よりご提供頂き作成しています。
公式ドキュメント
Zeus Carに関する公式ドキュメントは以下の通りです。
Zeus Carの入手先
Zeus Carはアマゾンで購入可能です。
2023年9月現在、日本円で15000円前後で販売されていますが、Arduino本体が含まれていることと、多数のセンサーが含まれていますので、驚異的な価格設定です。

Zeus Carのパッケージ内容
まずはZeus Carのパッケージ内容を確認していきます。
こちらがZeus Carのパッケージになります。

箱の裏面には機能説明と注意書きがあります。
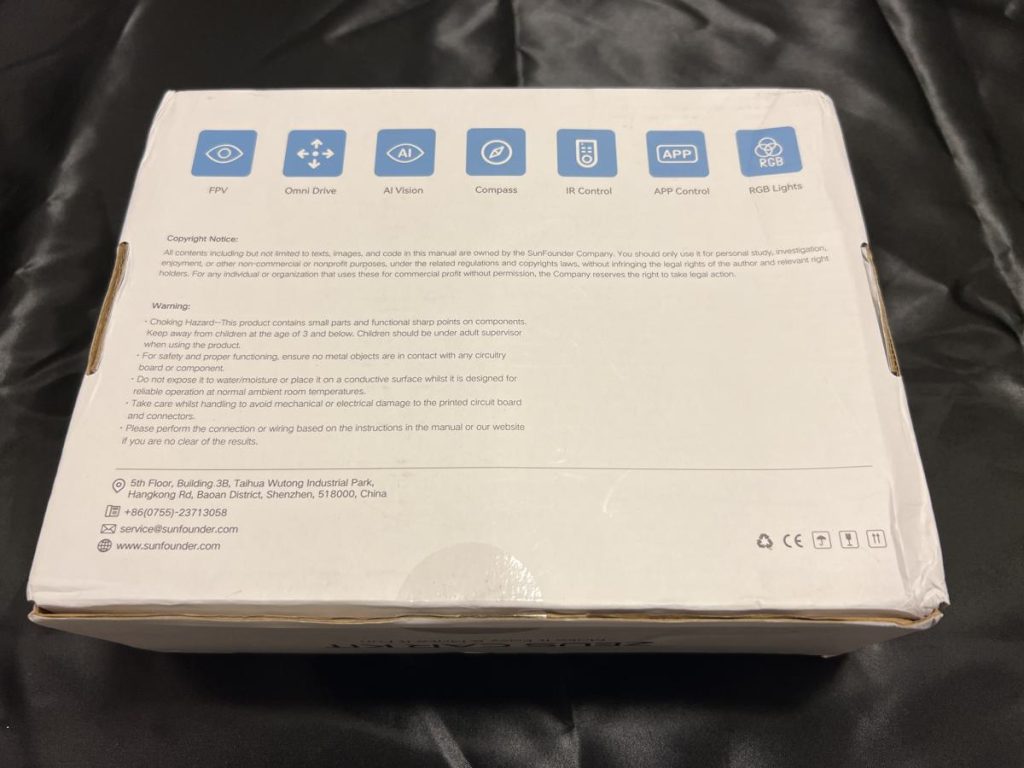
箱を開けるとマニュアルと4つのパーツが入った箱が入っています。
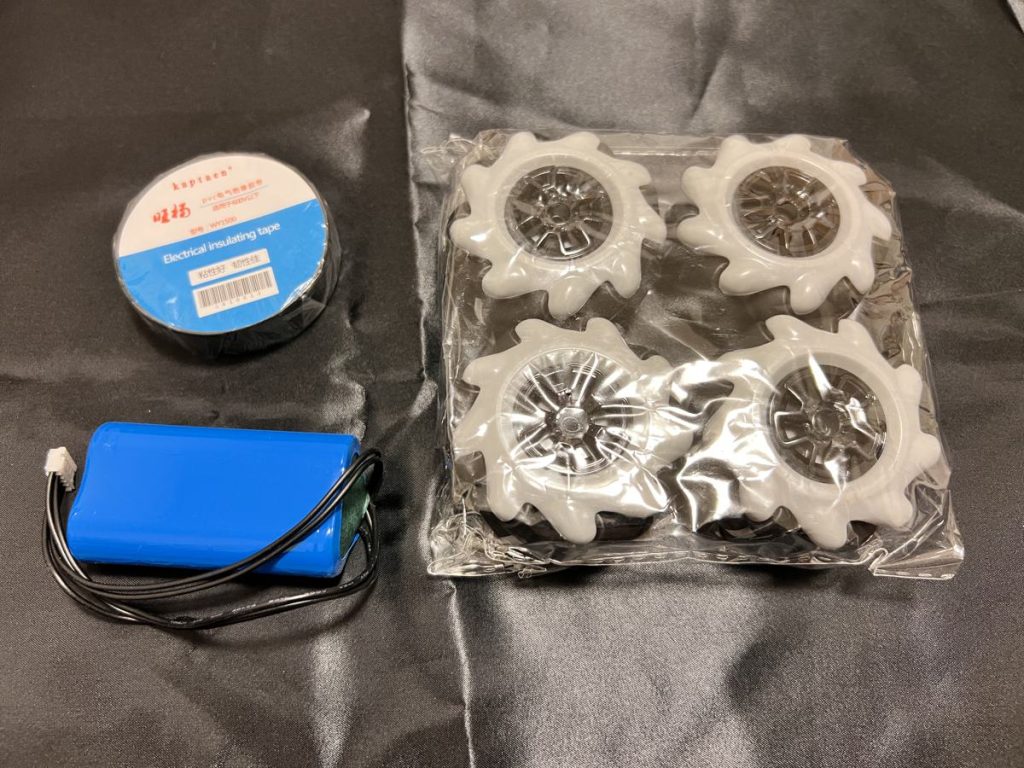
メカナムホイールとバッテリー。
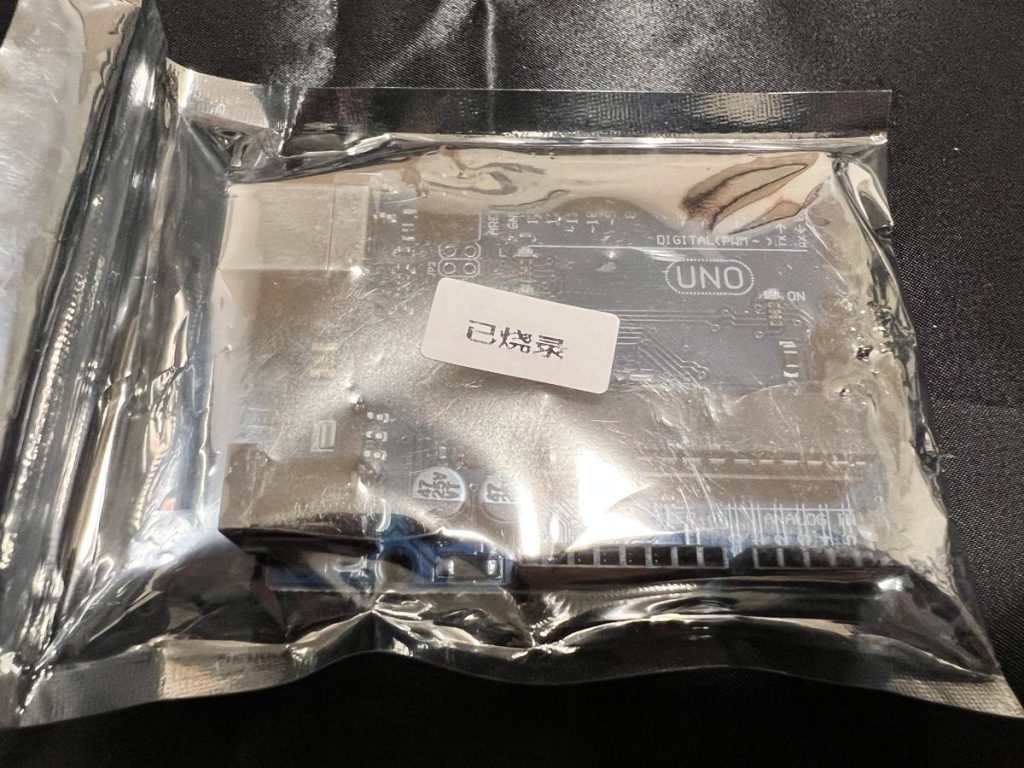
制御ボード、各種センサー、駆動用モータです。

メインコントローラはArduino UNO互換ボードです。
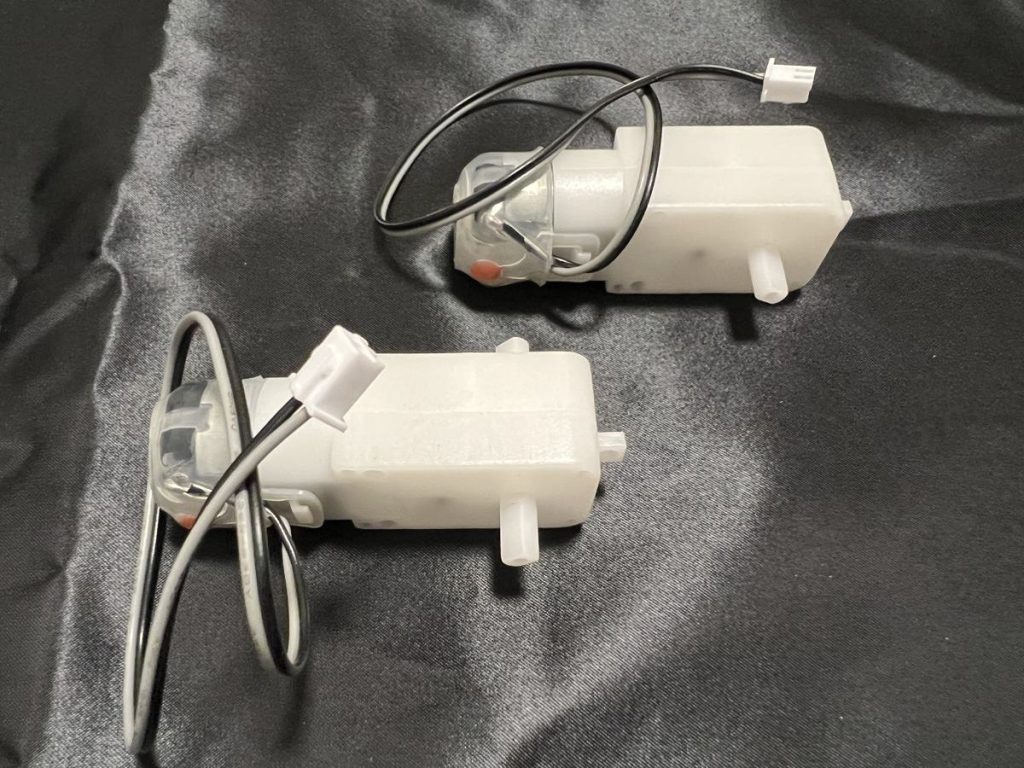
駆動用モーターも最初から配線がはんだ付けされており、コネクターを差すだけで使えるようになっています。
ロボットのフレームとビス類、工具類です。
ロボットのフレームがアルミでできていて、強度と高級感があります。

ケーブル類とロボットを制御するリモコンです。

以上がZeus Carのパッケージ内容です。
Zeus Carの組み立て
ここからはZeus Carを実際に組み立てる工程を解説していきます。
駆動用DCモーターの取り付け
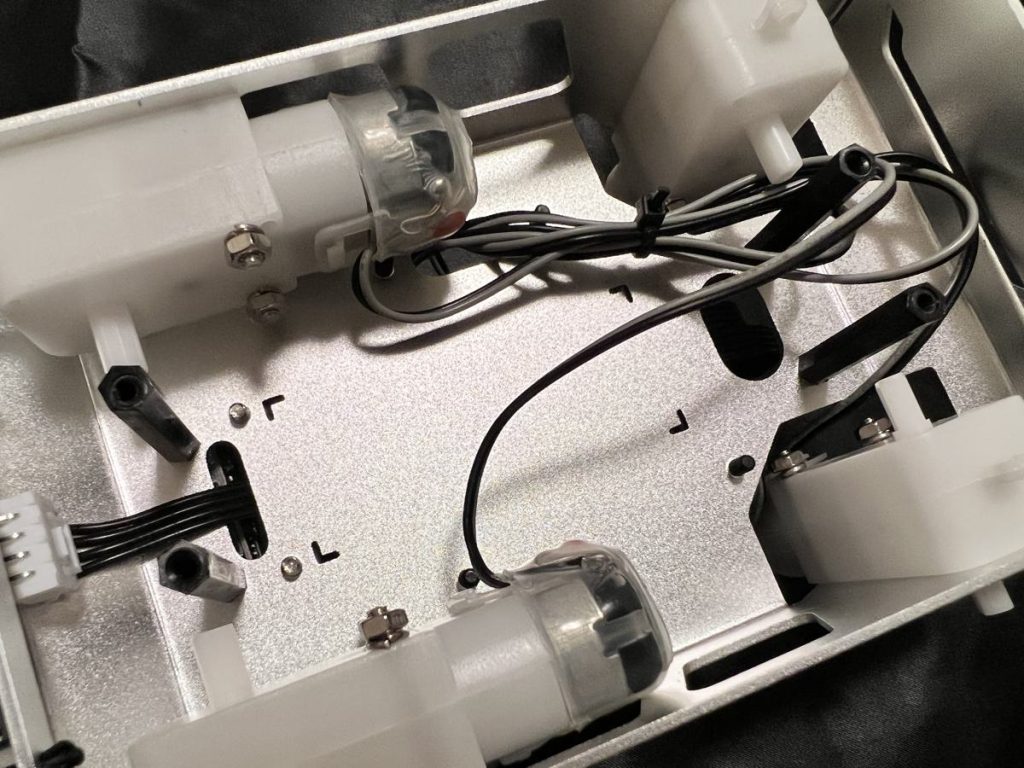
まず初めにフレーム本体にメカナムホイールを駆動するためのDCモーターを取り付けます。
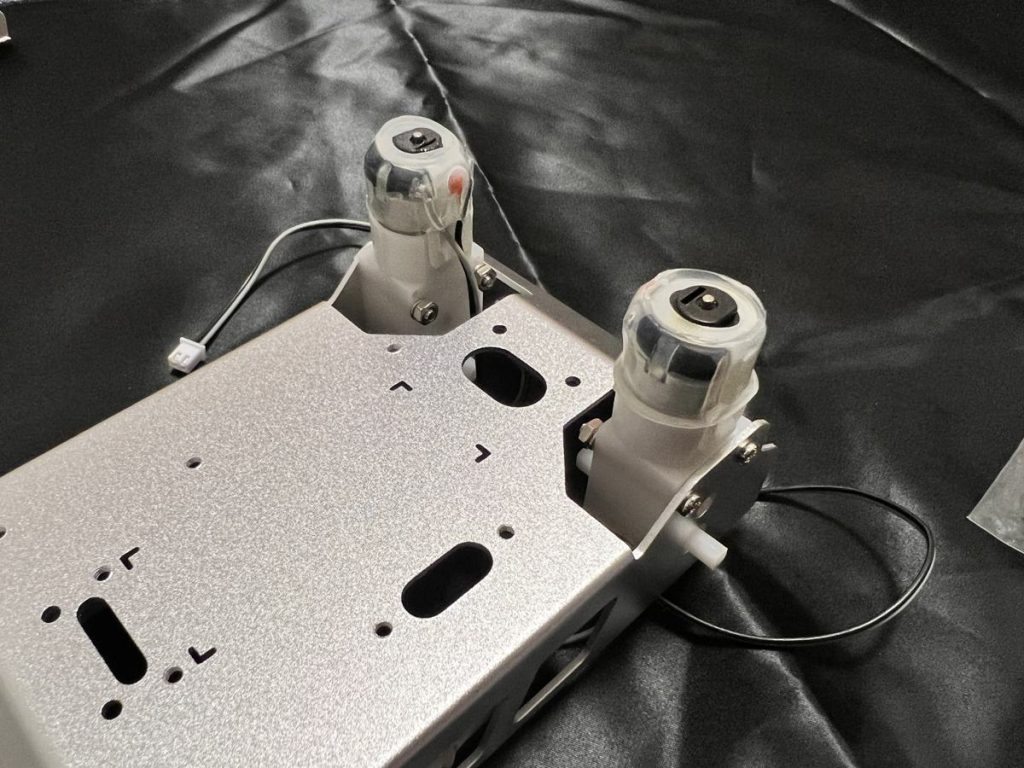
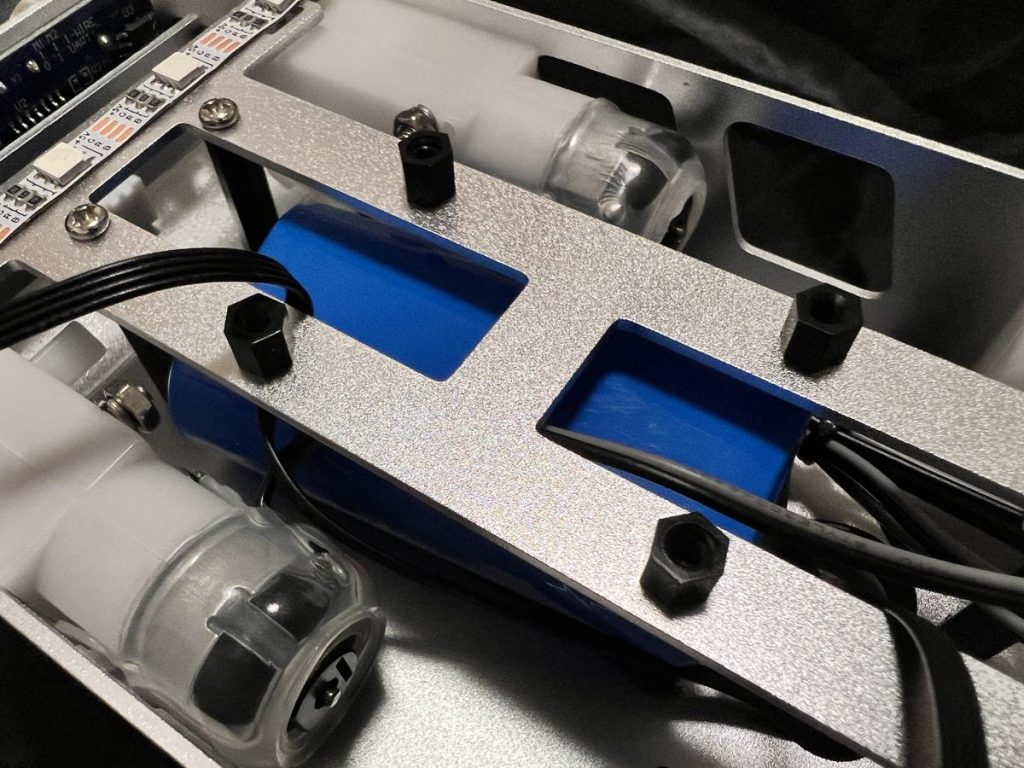
1つのモーターにつき、2つのボルト、ナットで固定してきます。ナットをはめるときは、付属のワッシャーをかませてください。

前輪のモーターを取り付けた状態です。

後輪のモーターは写真のように立てた状態で取り付けます。
HC-SR04センサーの取り付け
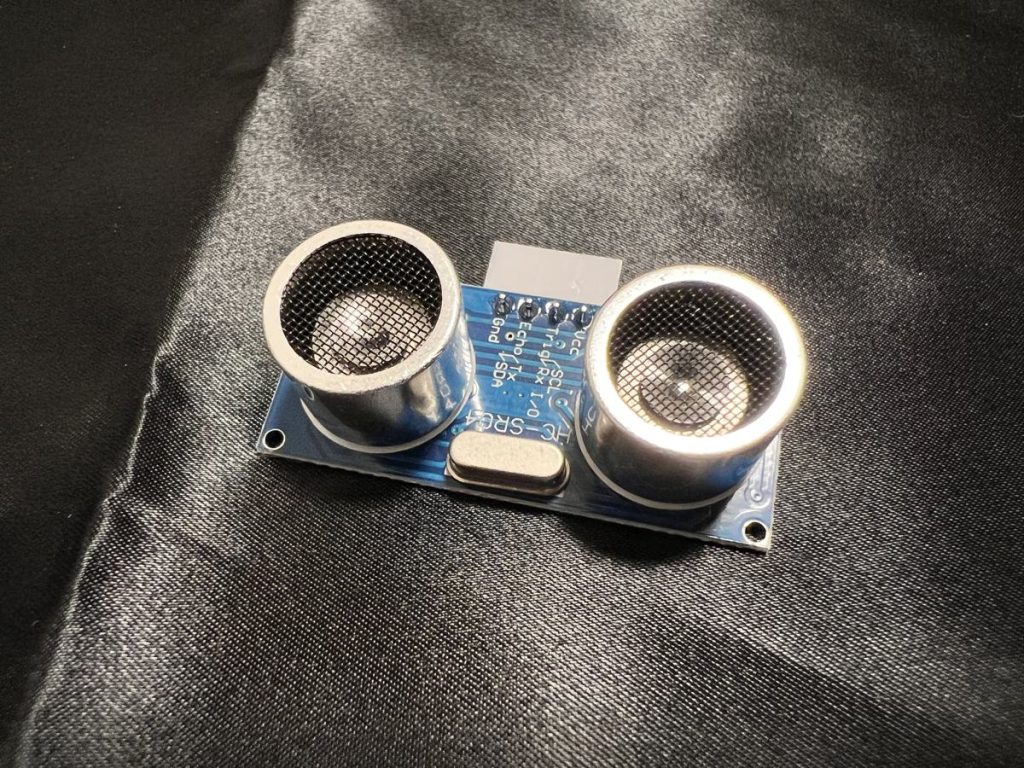
続いて障害物までの距離を計測するためのHC-SR04を取り付けます。
HC-SR04は超音波センサーで、発した超音波が物体に反射して返ってくるまでの時間を元に距離を判定しますので、車体の最前面に搭載されます。
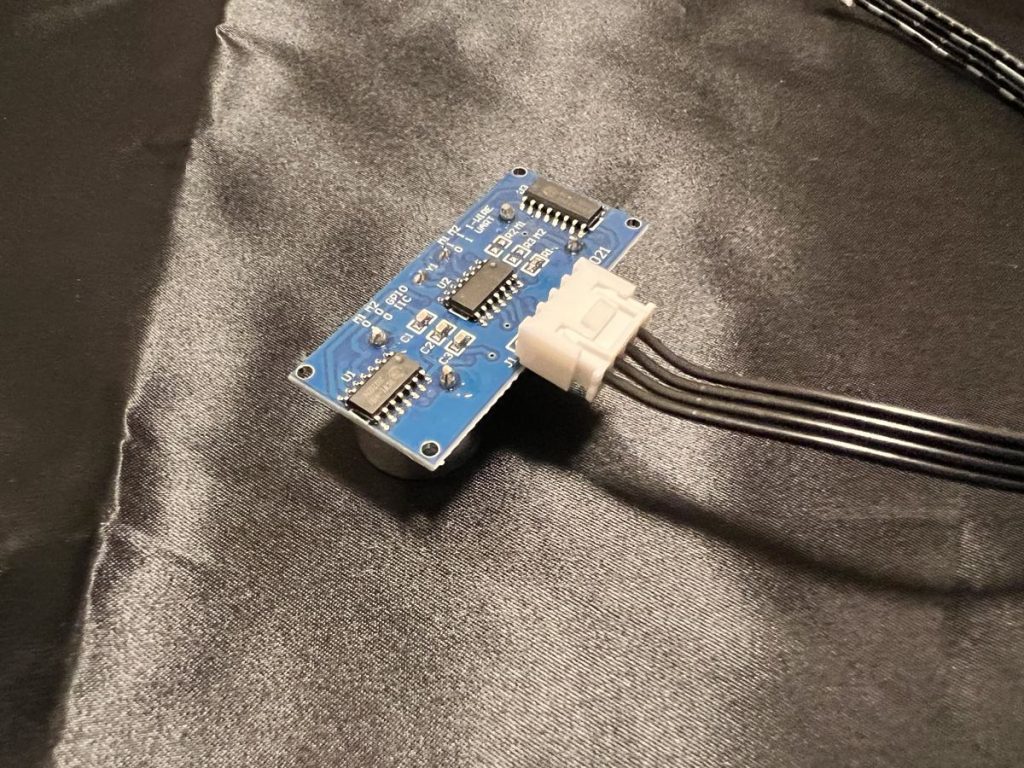
HC-SR04の基板背面のコネクタに7pinのコネクタが付いたケーブルを接続します。
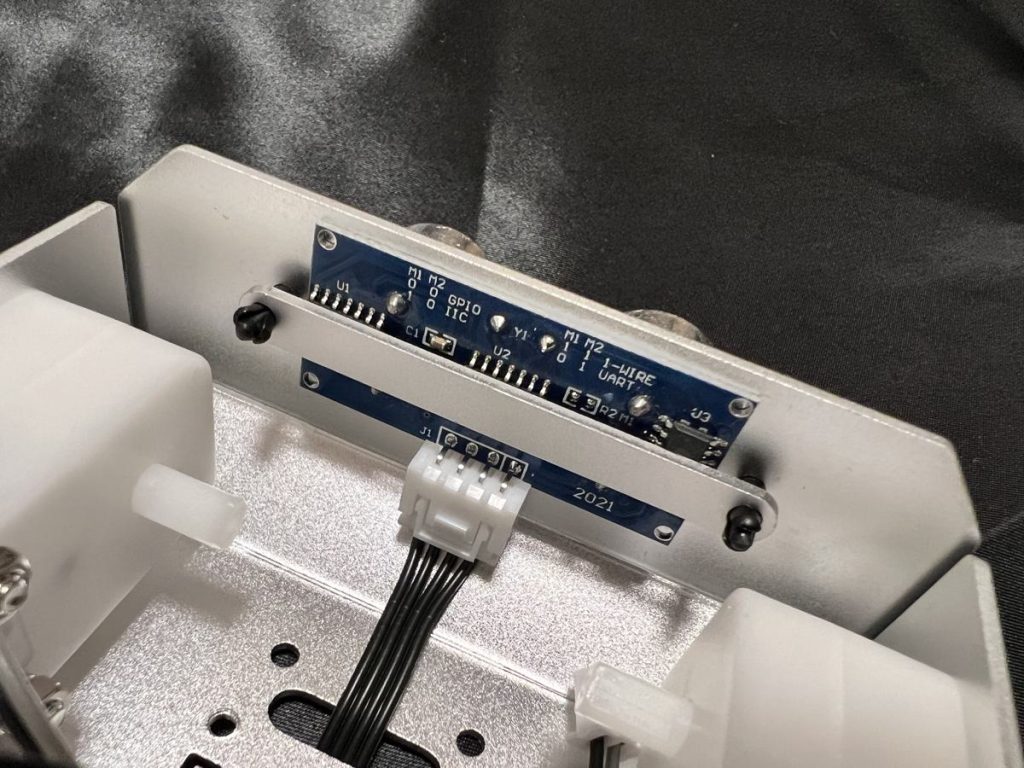
車体には以下の写真のようにバーで上から挟み込む形で抑え、ビスで両サイドを固定します。
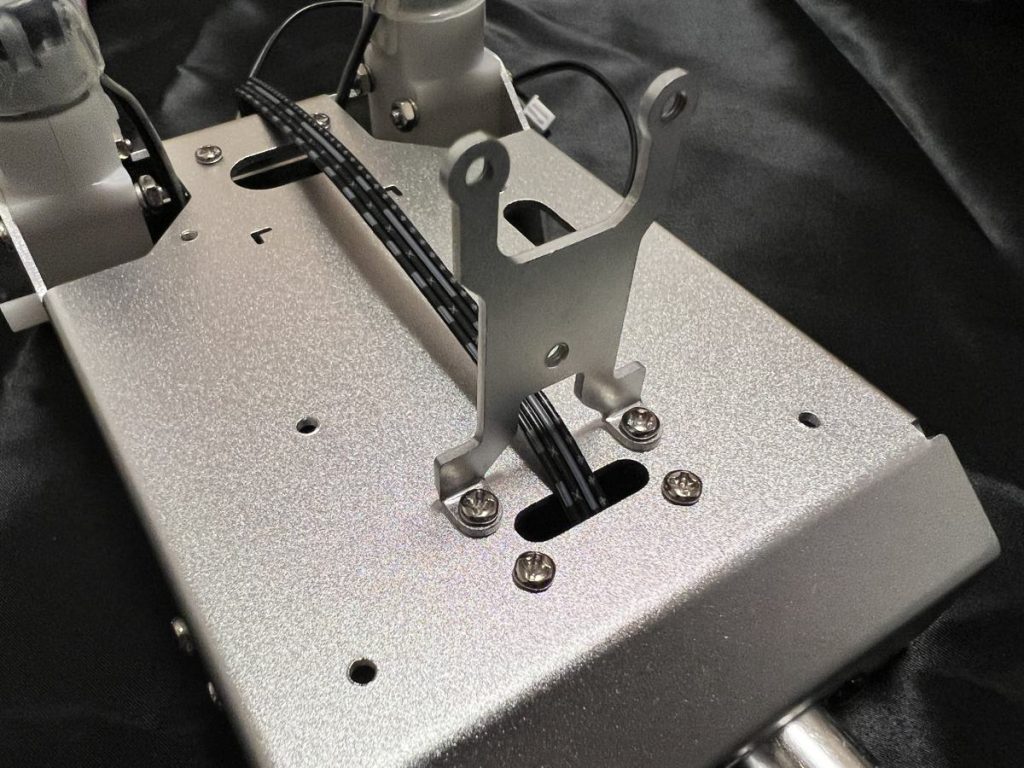
フレームの外側から見た状態です。ちょうどセンサ部がフレームから突き出る形になります。

ESP32-CAMの取り付け
続いてカメラモジュールであるESP32-CAMを取り付けます。
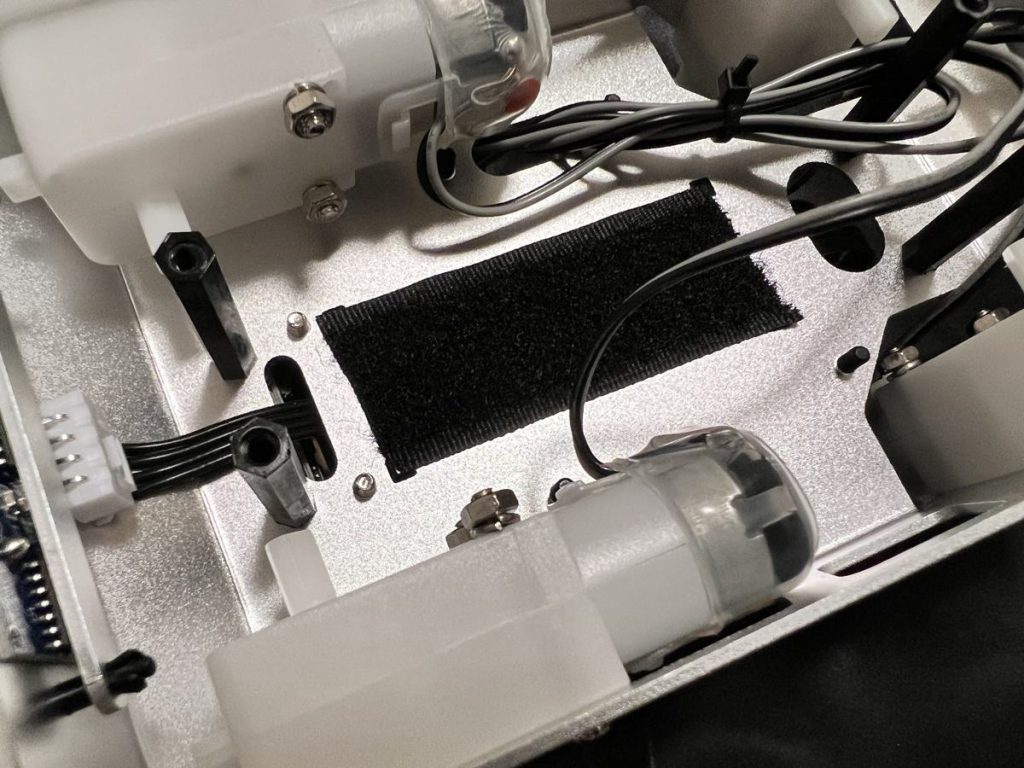
まず、カメラモジュールを取り付ける前に、後輪のDCモーター横のスペーサーを取り付けます。

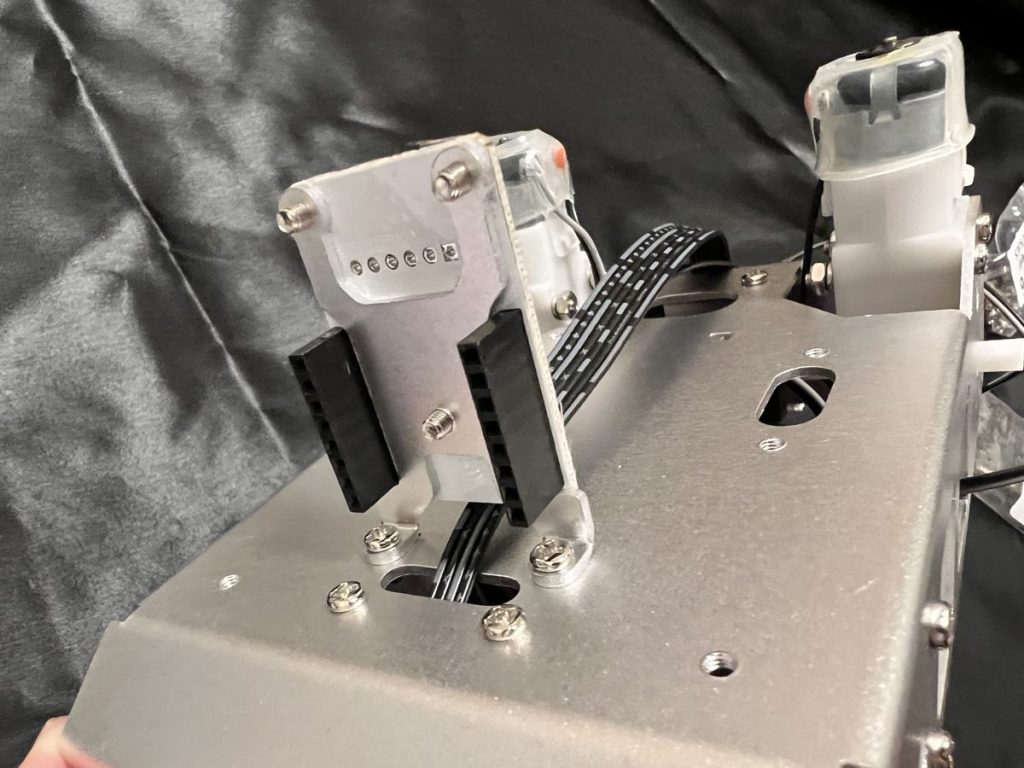
続いて、ボディフレームの外側の面にカメラを取り付けるためのフレームを取り付けます。
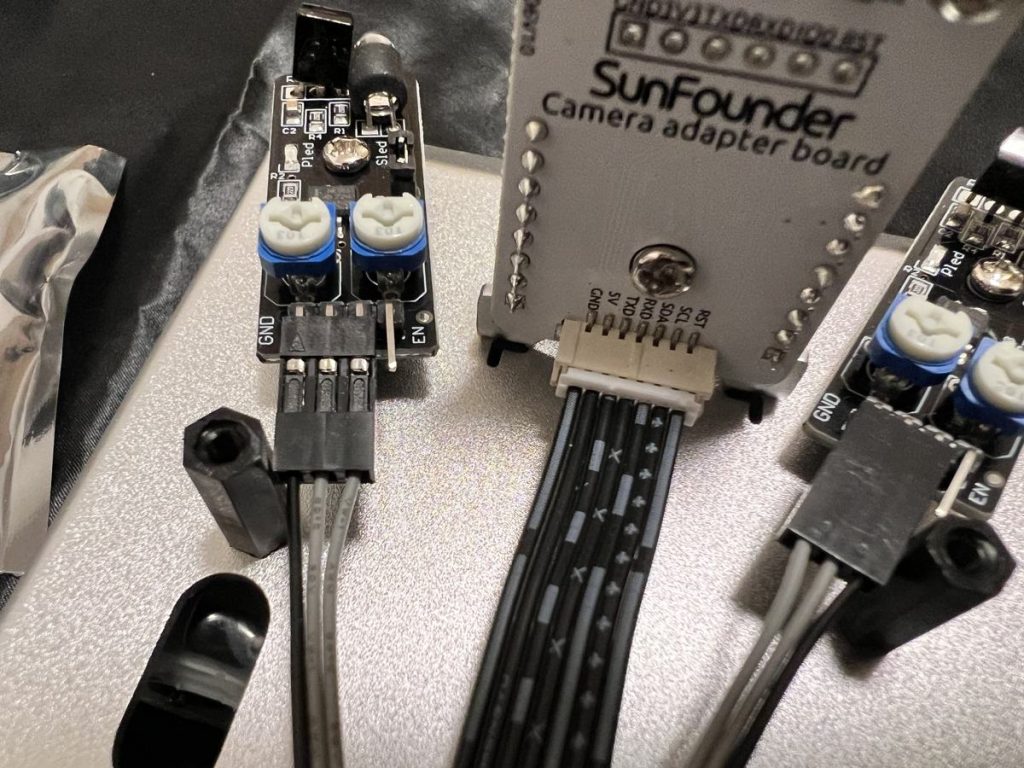
SunFounderのロゴがプリントされているカメラのベースボードに、7pinのケーブルのコネクターを接続します。
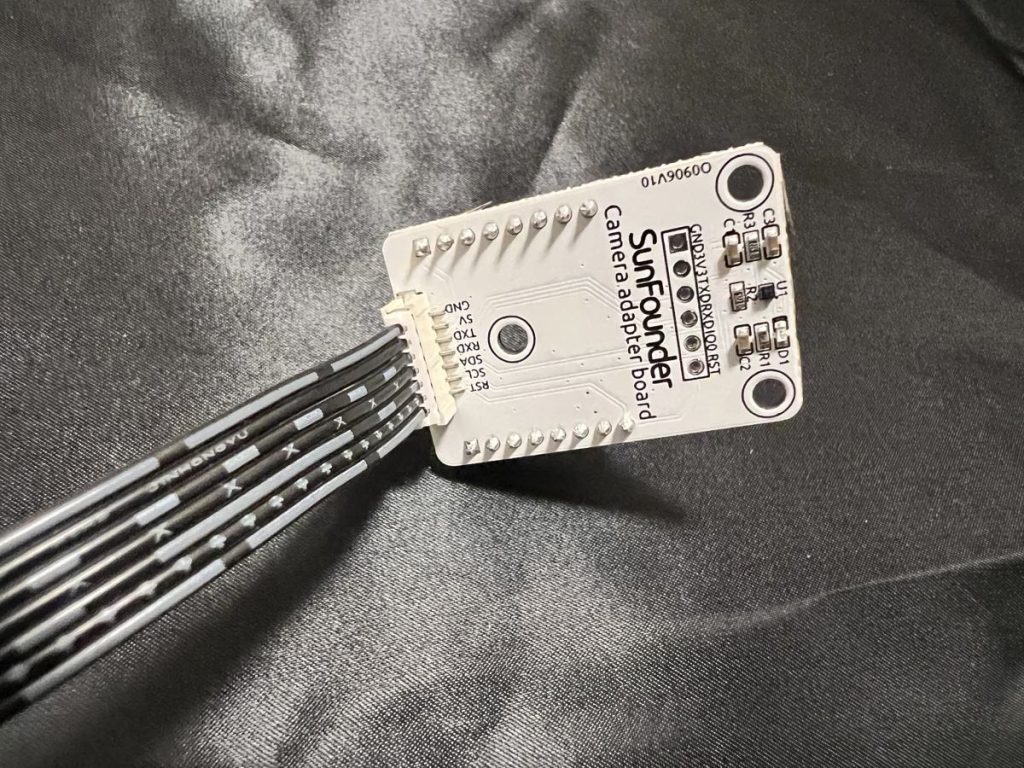
ベースボードの反対側の面には、ピンソケットがあらかじめはんだ付けされています。
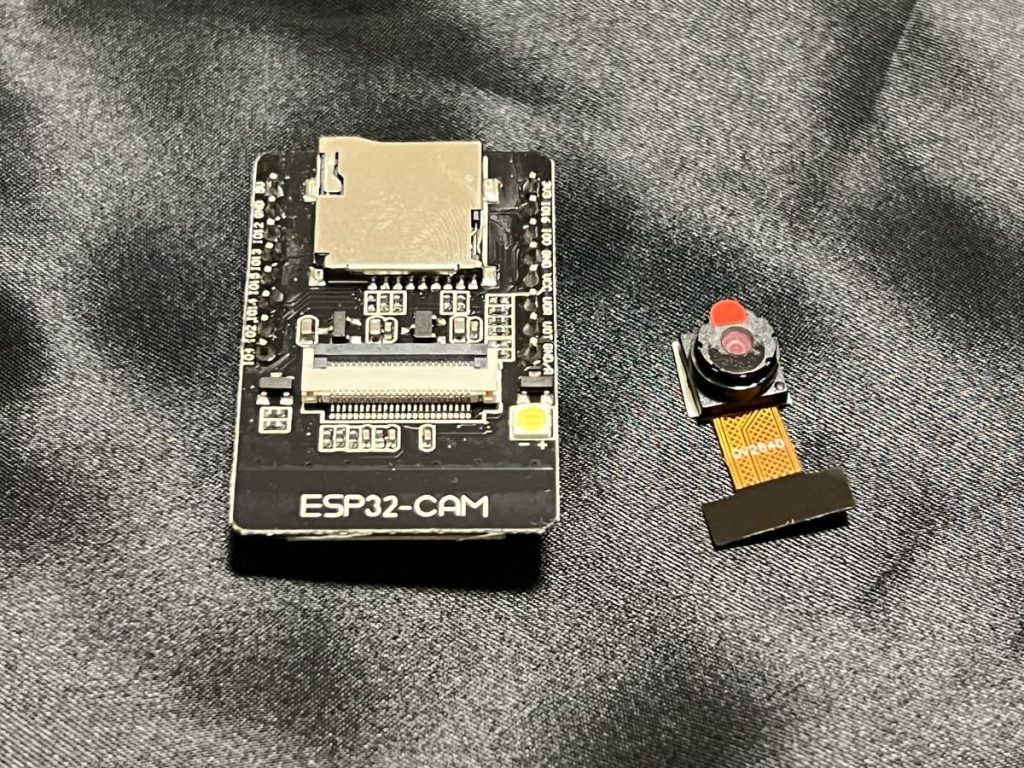
EPS32-CAMのボードとカメラを用意します。
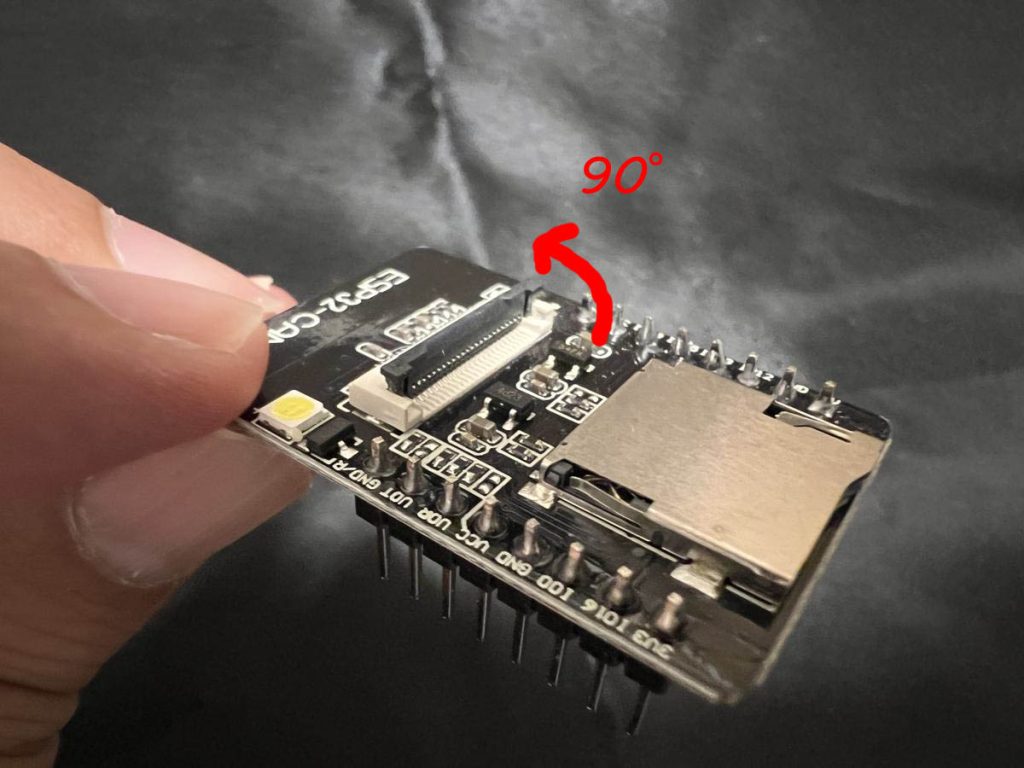
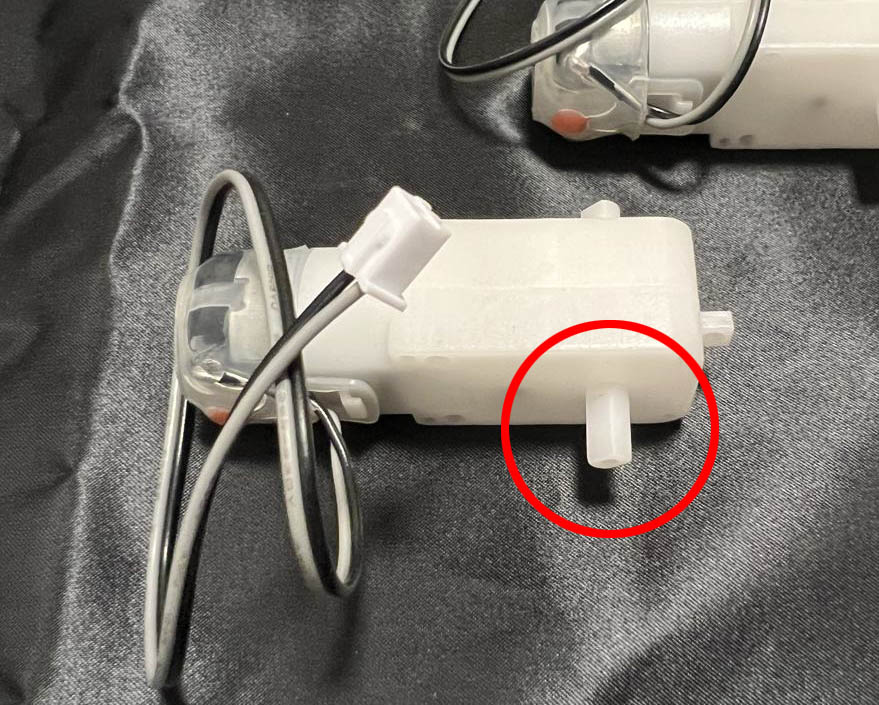
EPS32-CAMのボードの、カメラを接続するためのコネクタのストッパーを外します。
以下の写真の赤丸の部分がコネクタになります。
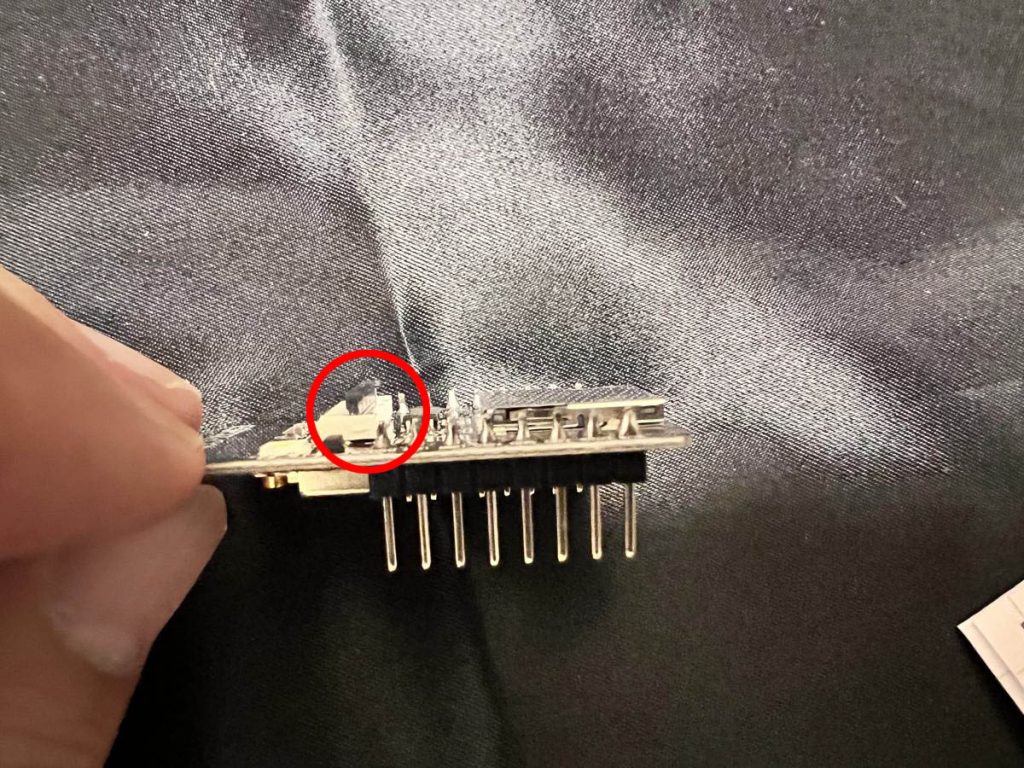
黒色のストッパーを90°立ち上げる形でオープンします。
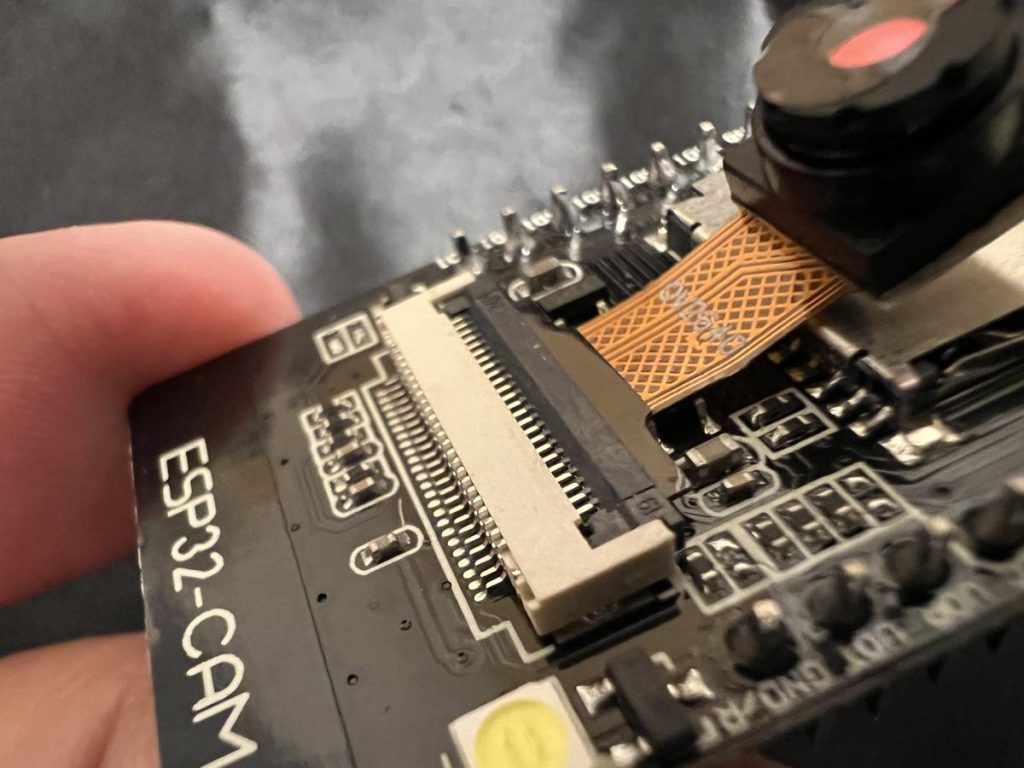
カメラのケーブルをオープンしたコネクタ部分に差し込みます。
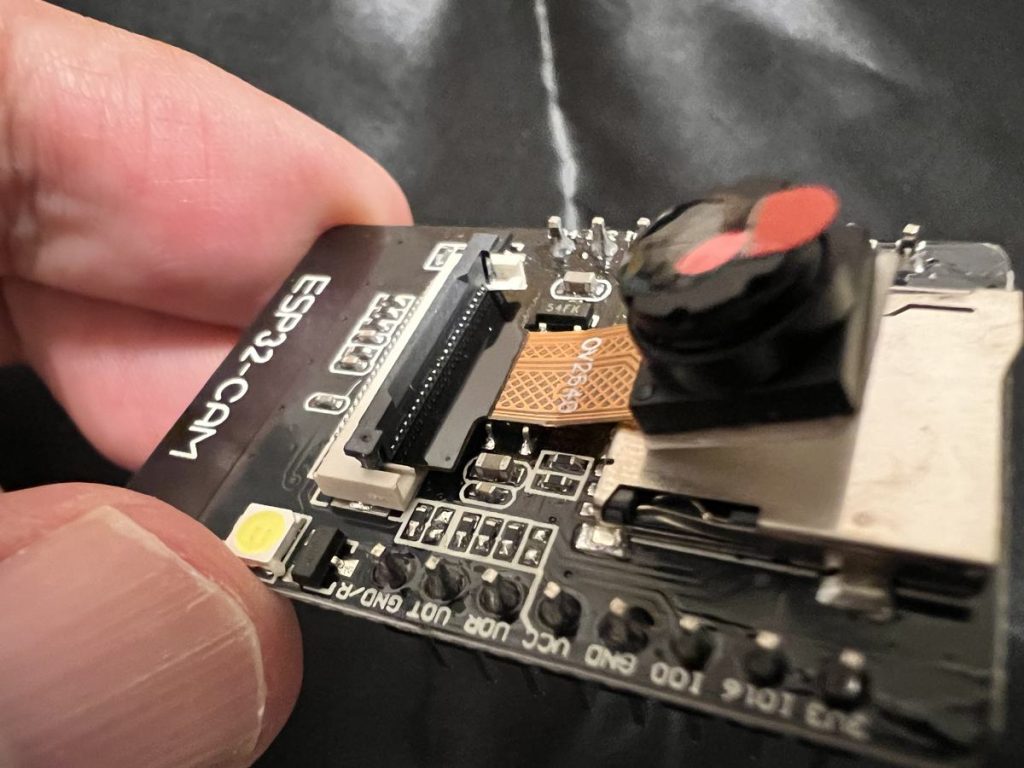
ストッパーを水平の位置まで戻し、ケーブルをロックします。
カメラの裏面に両面テープが付けられており、本来はEPS32-CAMボードに貼り付けるのですが、ケーブルがコネクタに刺さっていないとうまく動作しませんので、現時点ではまだ両面テープは貼り付けません。
後程、カメラの動作確認ができたらテープを貼り付けます。
カメラを接続したEPS32-CAMボードを先ほどのベースボードのピンソケットに差し込みます。

距離センサーの取り付け
続いてカメラ両サイドに配置される距離センサーを取り付けます。
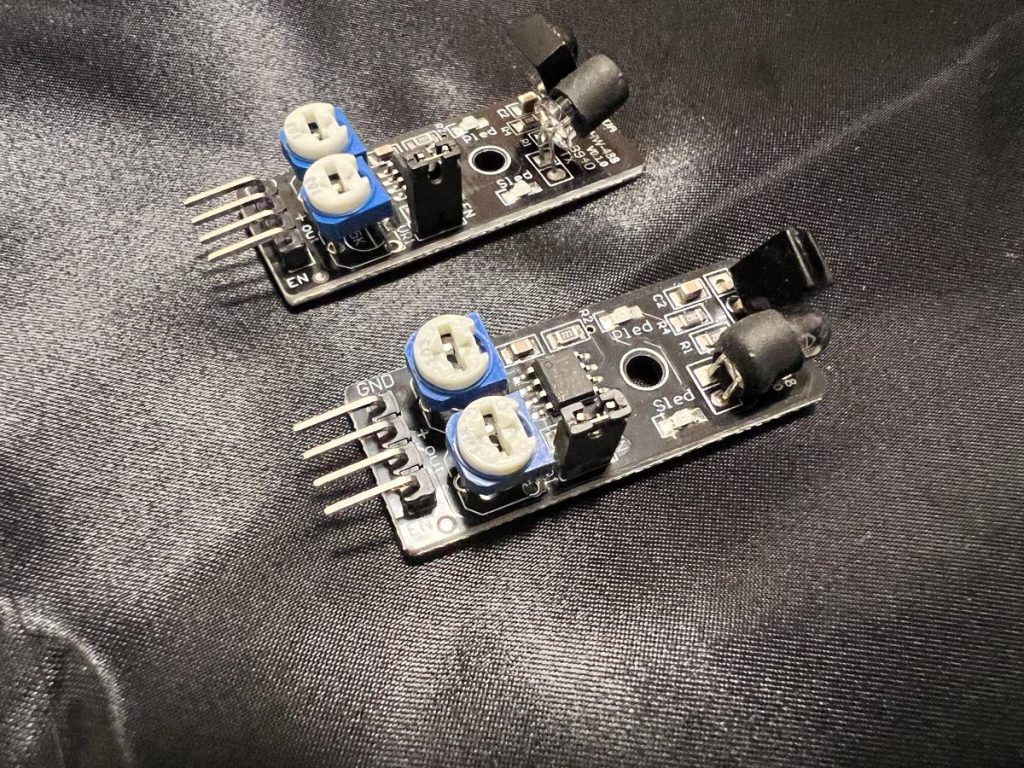
Zeus Carのフロントコーナー部分に取り付けられる距離センサー以下のモジュールとなります。
このセンサーは赤外線を照射し、物体からの反射時間により距離を計測します。
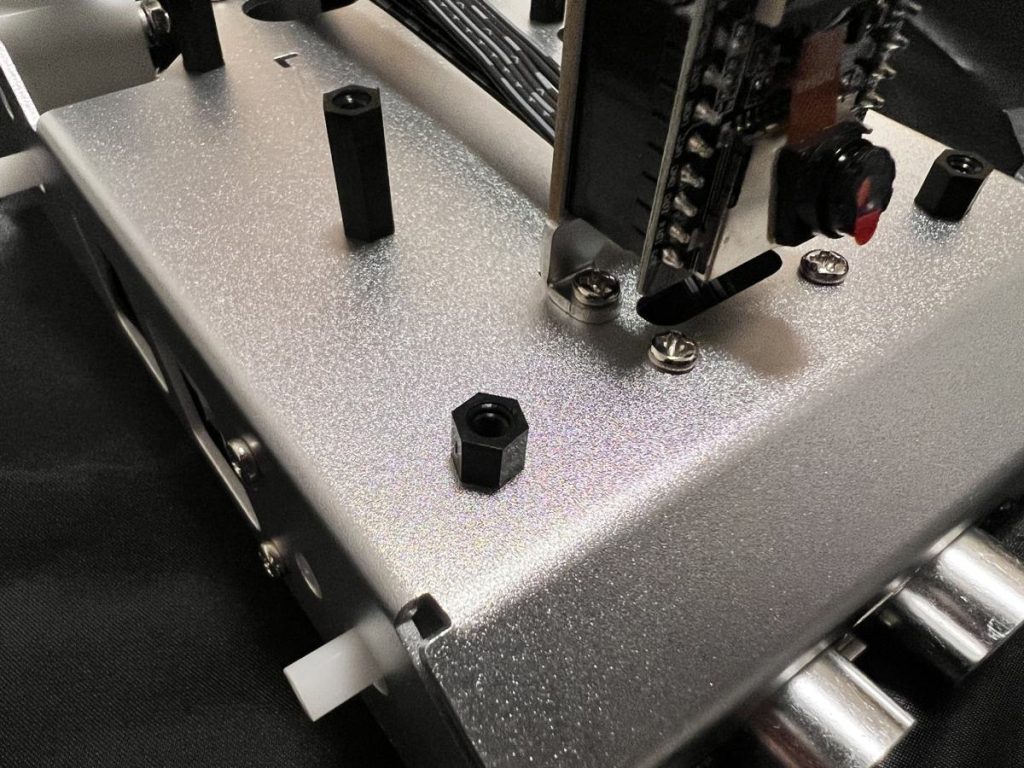
まず、ボディフレーム上面にArduino本体を固定するスペーサーを4つ取り付けます。

続いてフロント部分に距離センサーを固定するためのスペーサーを2つ取り付けます。
赤外線センサーを以下のようにカメラ両サイドに2つ、斜めの方向に向けて状態で配置します。
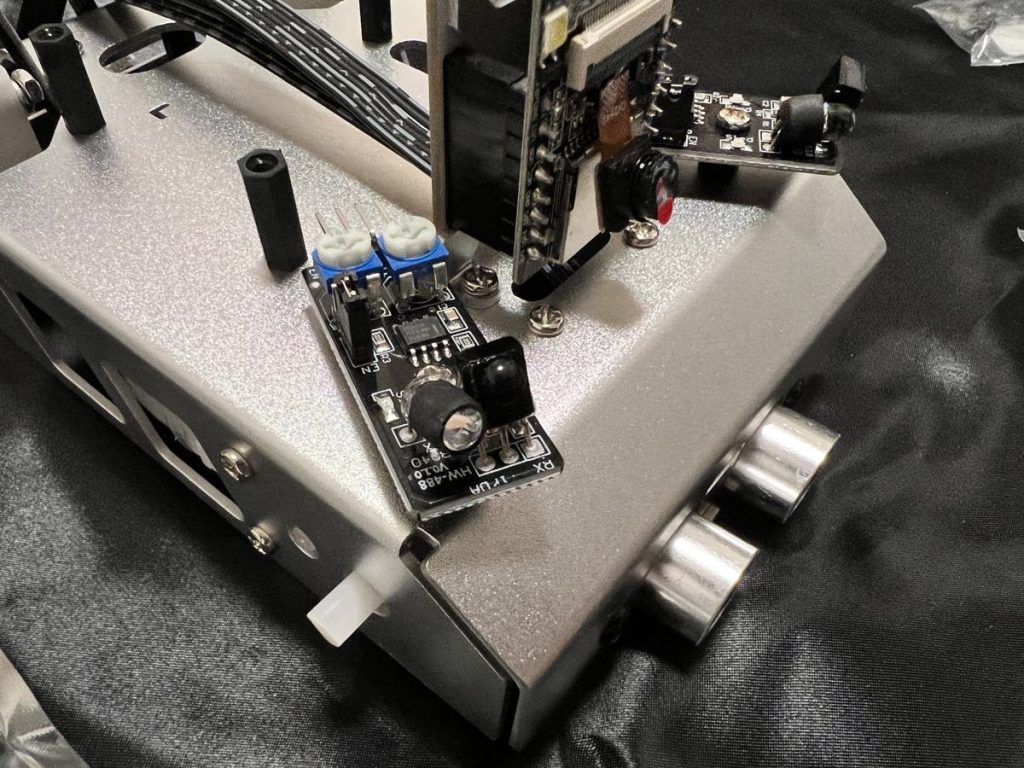
各距離センサーに3pinのコネクターが付いたケーブルを接続します。写真の向きから見て一番右のEN端子以外の3pinに接続してください。
Arduino本体の取り付け
本製品のメインコントローラとなるArduino互換ボードを取り付けます。
ロボットフレーム上面のスペーサーに4か所で固定します。これまで取り付けたセンサー類のケーブルにかぶさるように固定してください。
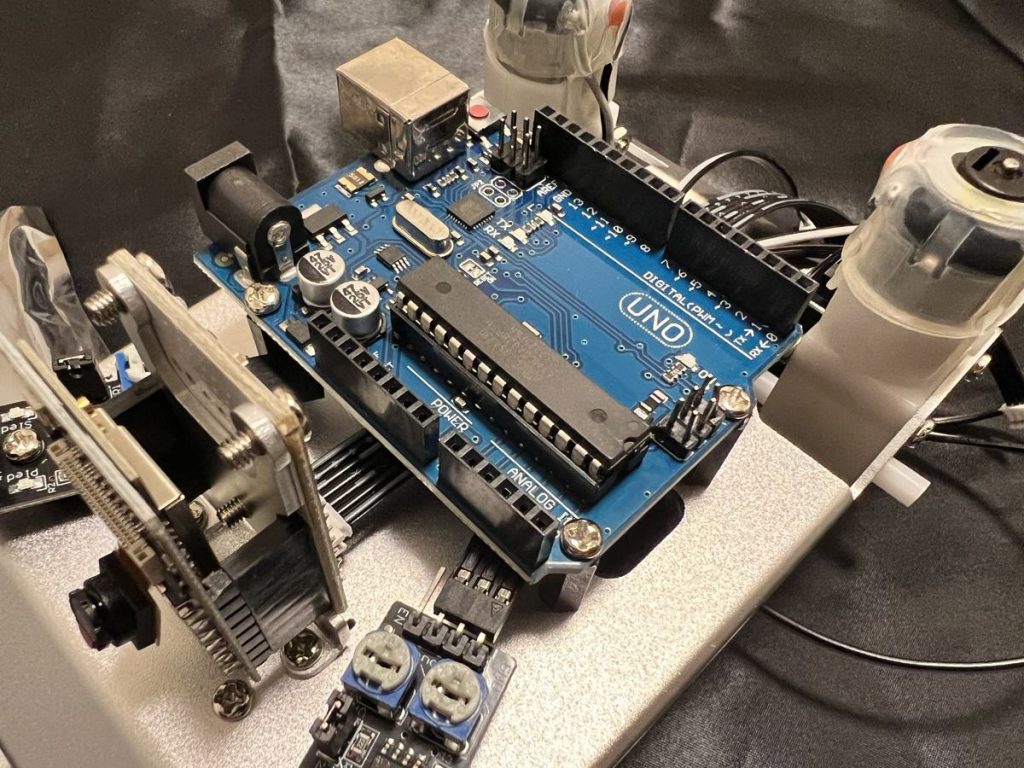
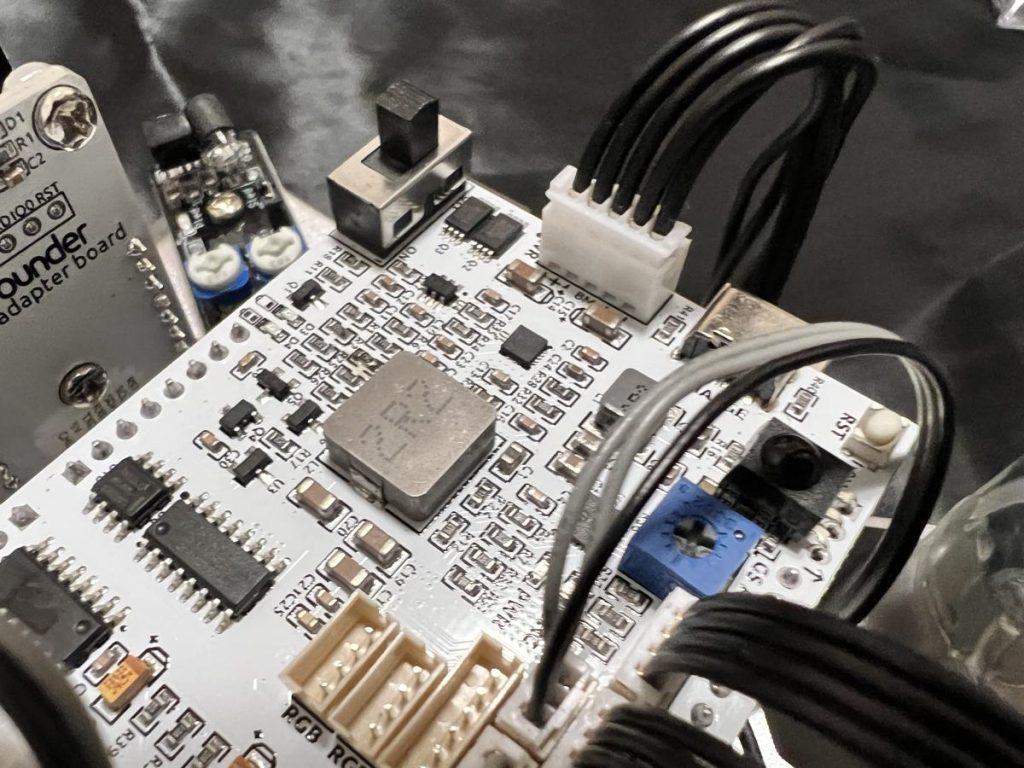
Zeus Carシールドの取り付け
今回のロボットに搭載されるセンサー、アクチュエーター類のインタフェースとなるZeus Carシールドを取り付けます。
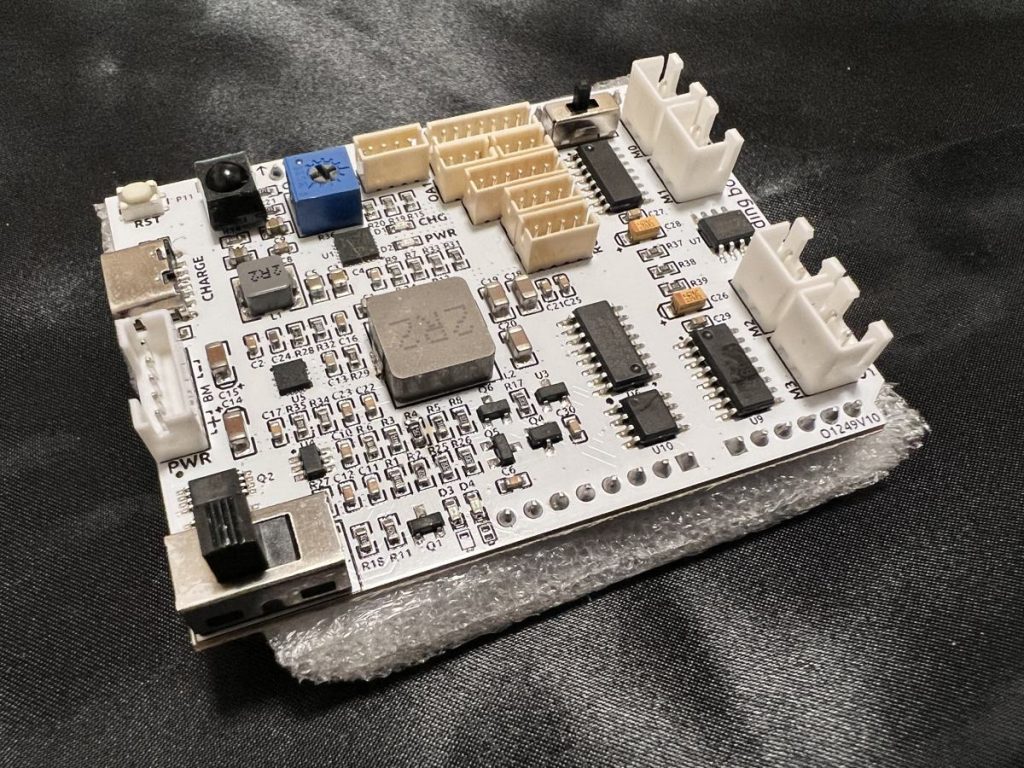
先ほど取り付けたArduinoのシールドソケットにZeus Carシールドを差し込みます。
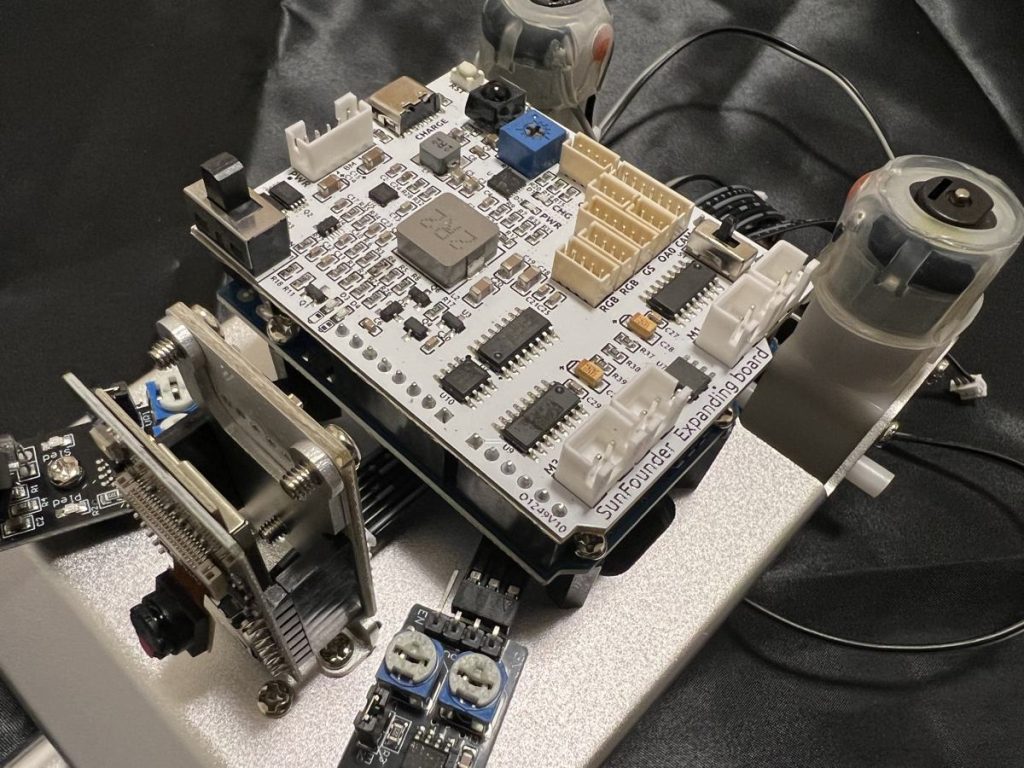
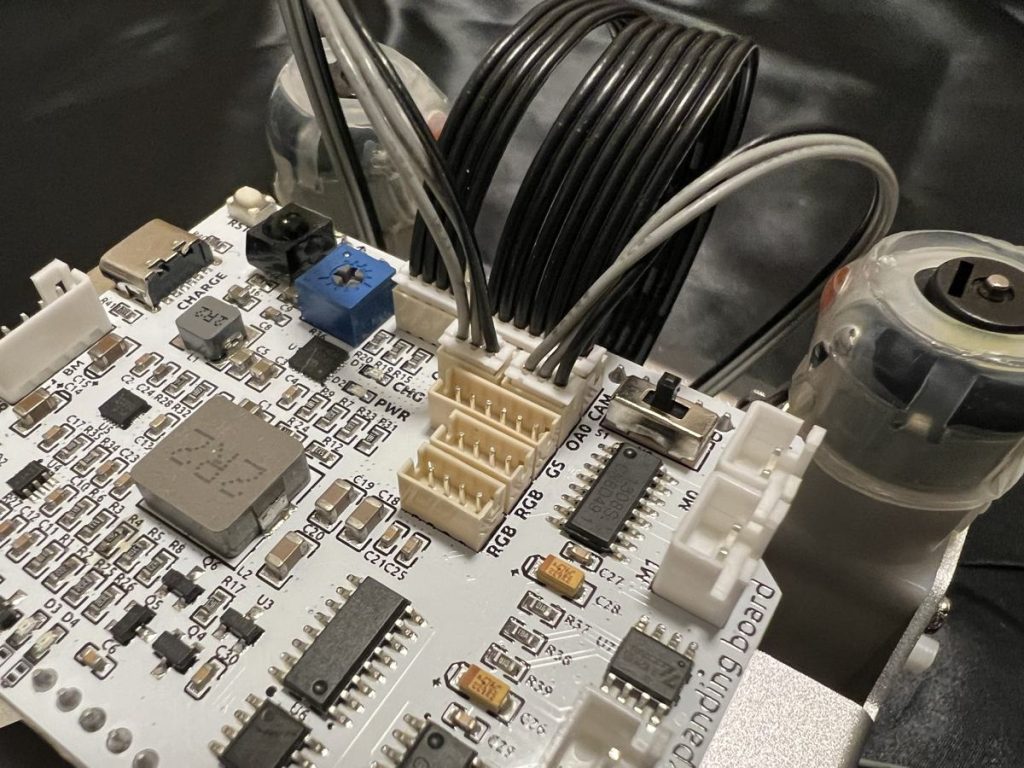
距離センサー、カメラを接続する
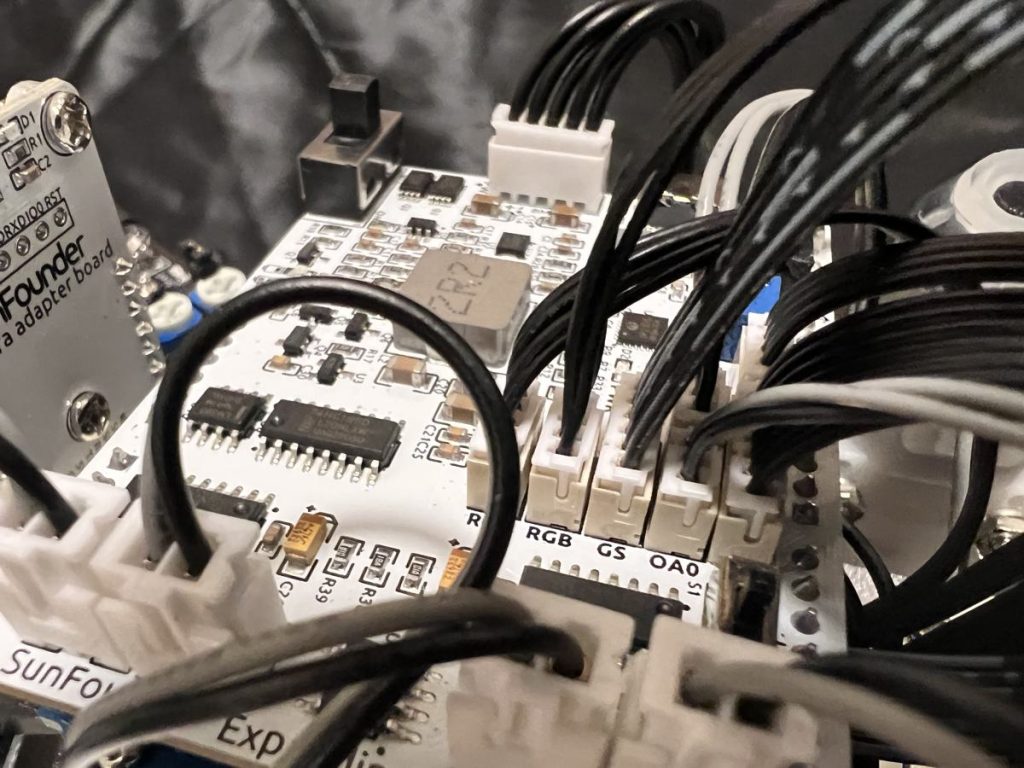
カメラモジュール、距離センサー(赤外線×2、超音波×1)のケーブルをシールドに接続します。
接続するコネクタはマニュアルを参照してください。
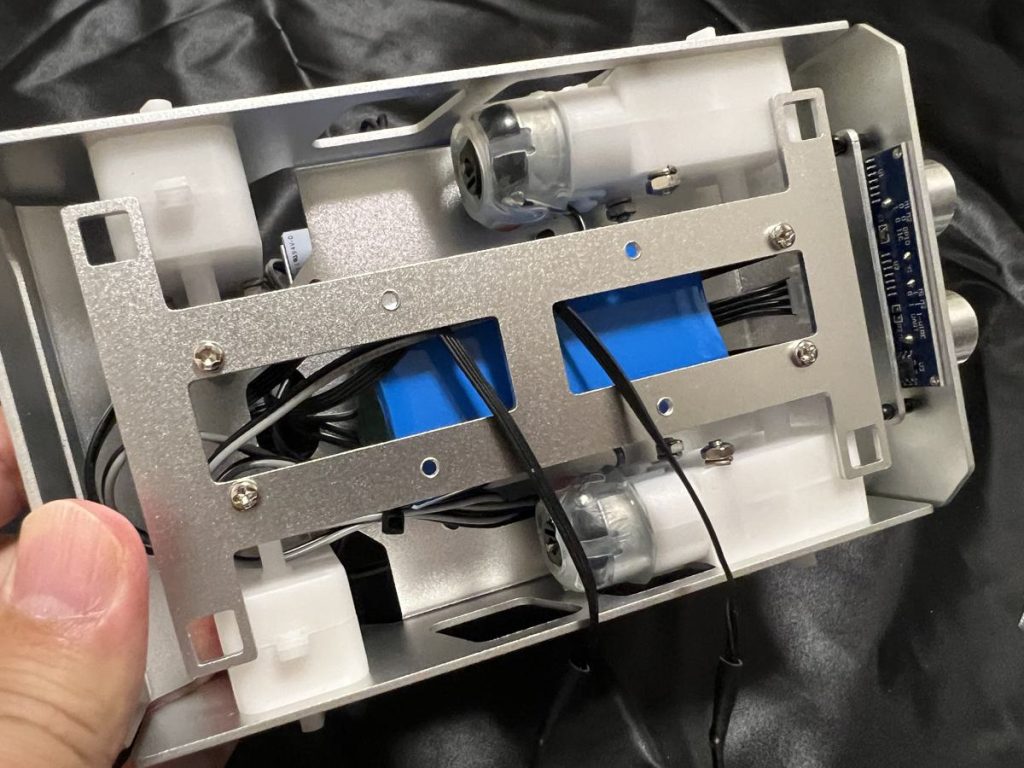
DCモーターを接続する
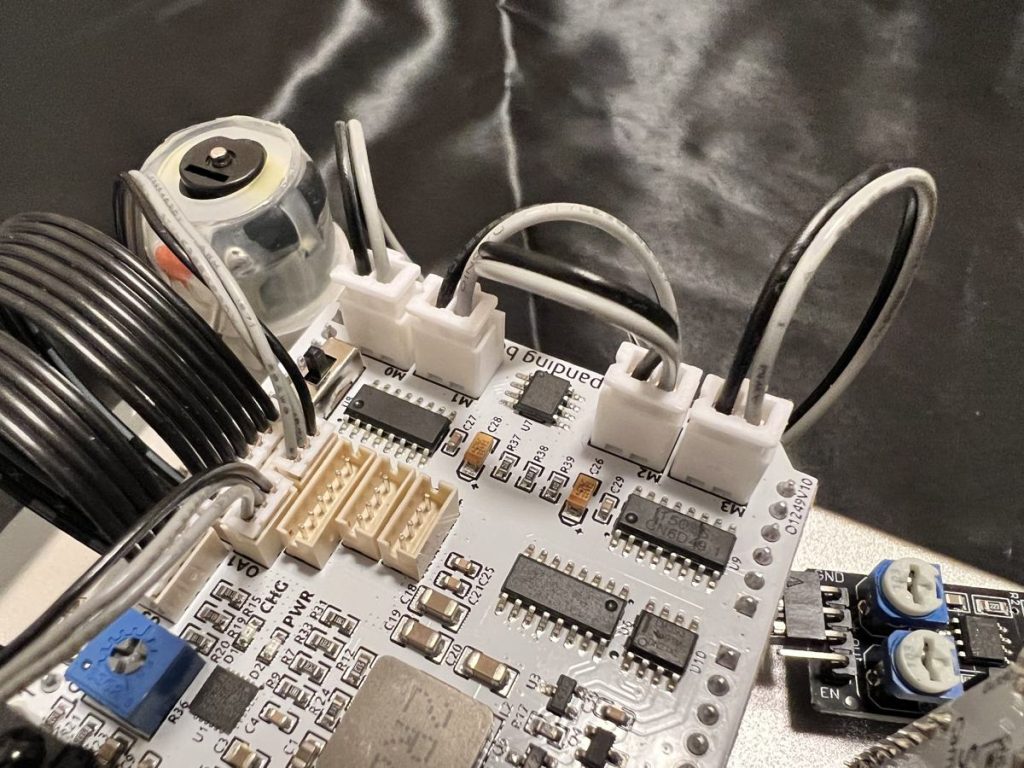
DCモーターのケーブルを以下のようにスペーサーの外側に来るように取り回します。(バッテリーを配置するスペースを確保するため)
各モータを写真のように側面のコネクタに接続します。どのモータをどこのコネクタに配置するかはマニュアルで確認してください。
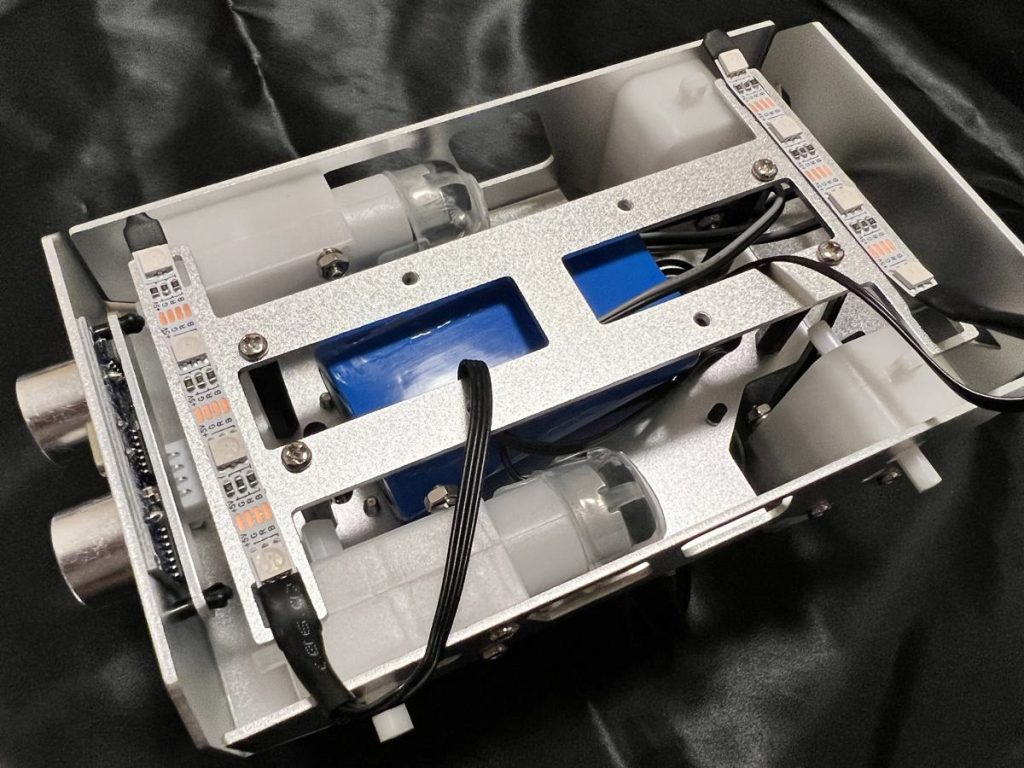
バッテリーの取り付け
フレーム背面の枠がプリントされている部分に、マジックテープについている両面テープで写真のように貼り付けます。
こちらがバッテリー本体になります。

バッテリーの片面にマジックテープを両面テープで貼り付けます。

フレーム背面のマジックテープにバッテリーを貼り付けます。
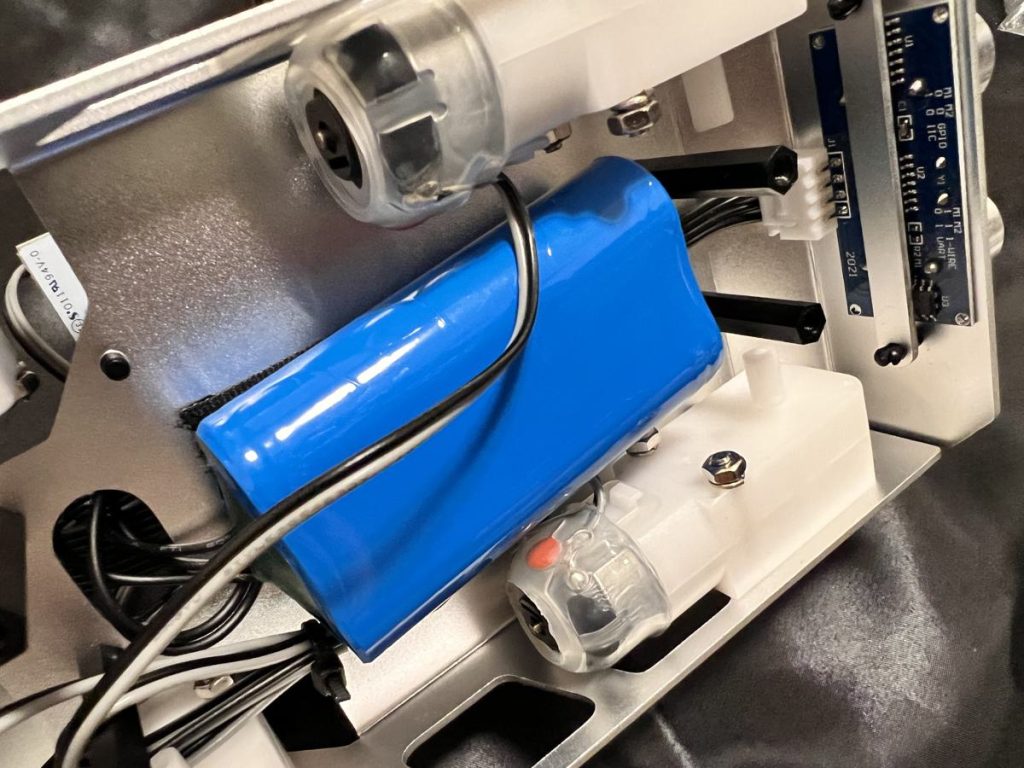
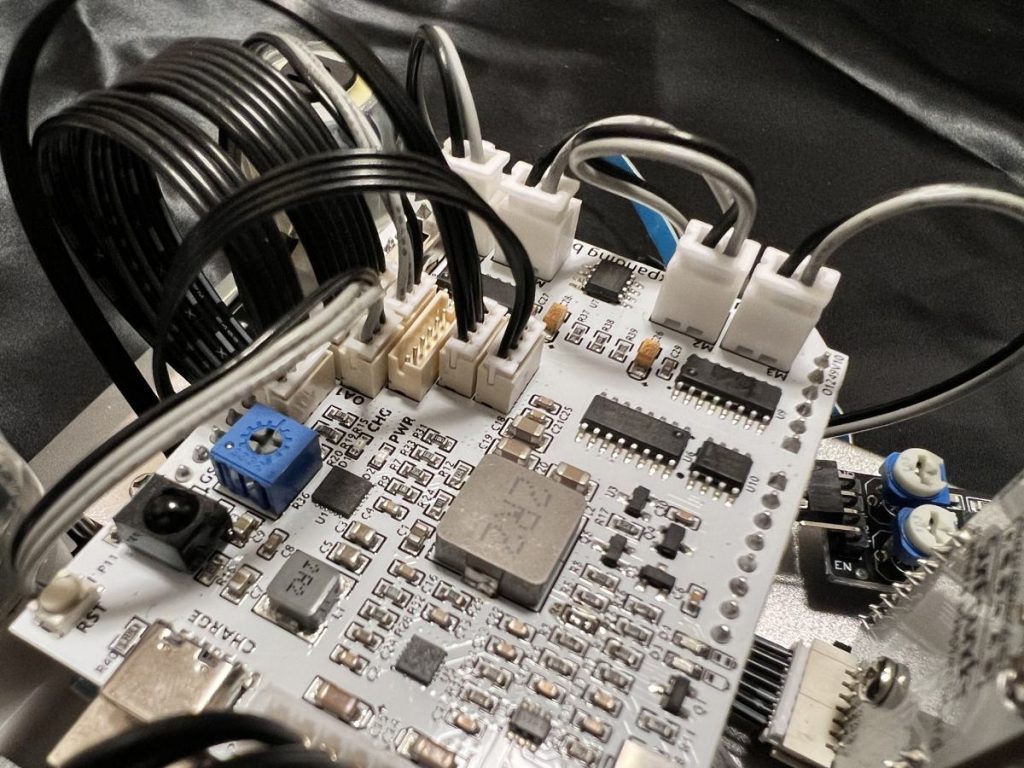
バッテリーのケーブルをZeus Carシールドの5pinコネクタに接続します。
LEDの取り付け
車体背面のLEDを取り付けます。
まずLEDテープのコネクタ2つをZeus Carシールドのコネクタに接続します。
車体背面の本体フレームのスペーサーにH型のフレームを4か所ビスで固定します。
取り付けたH型フレームの両サイドに、写真のようにLEDテープを両面テープで貼り付けます。
ライントレースセンサーの取り付け
ライントレースセンサーを取り付けます。
先ほどLEDテープを取り付けたH型のフレームにスペーサーを4つ取り付けます。
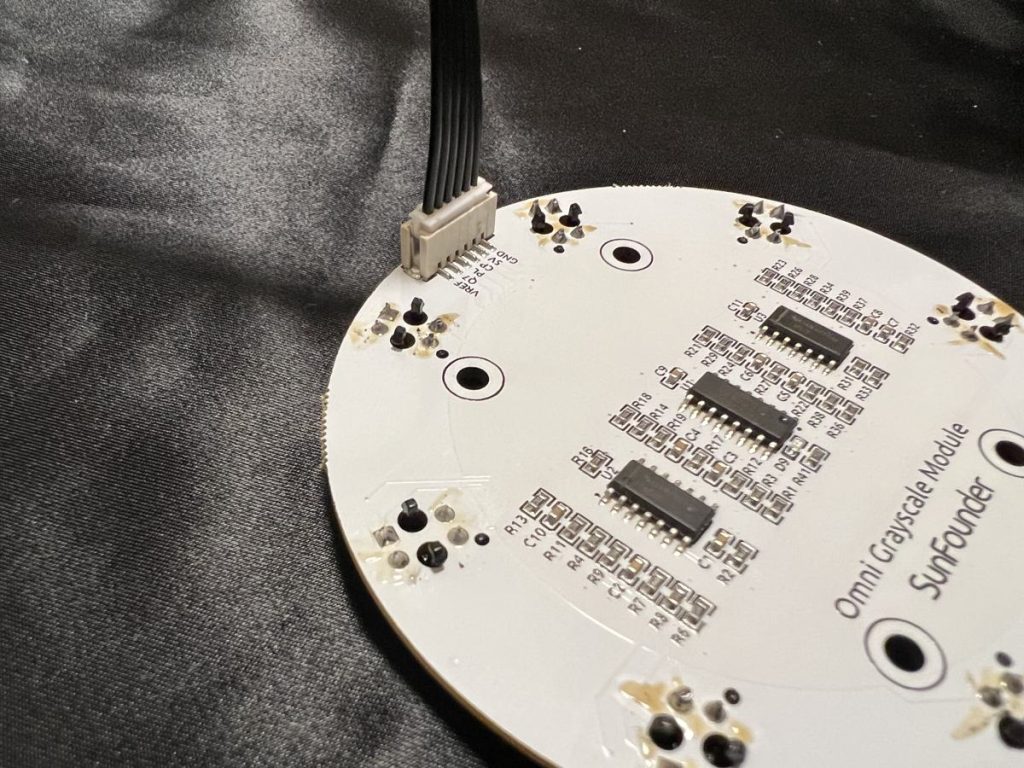
こちらがライントレース用センサーの基板です。
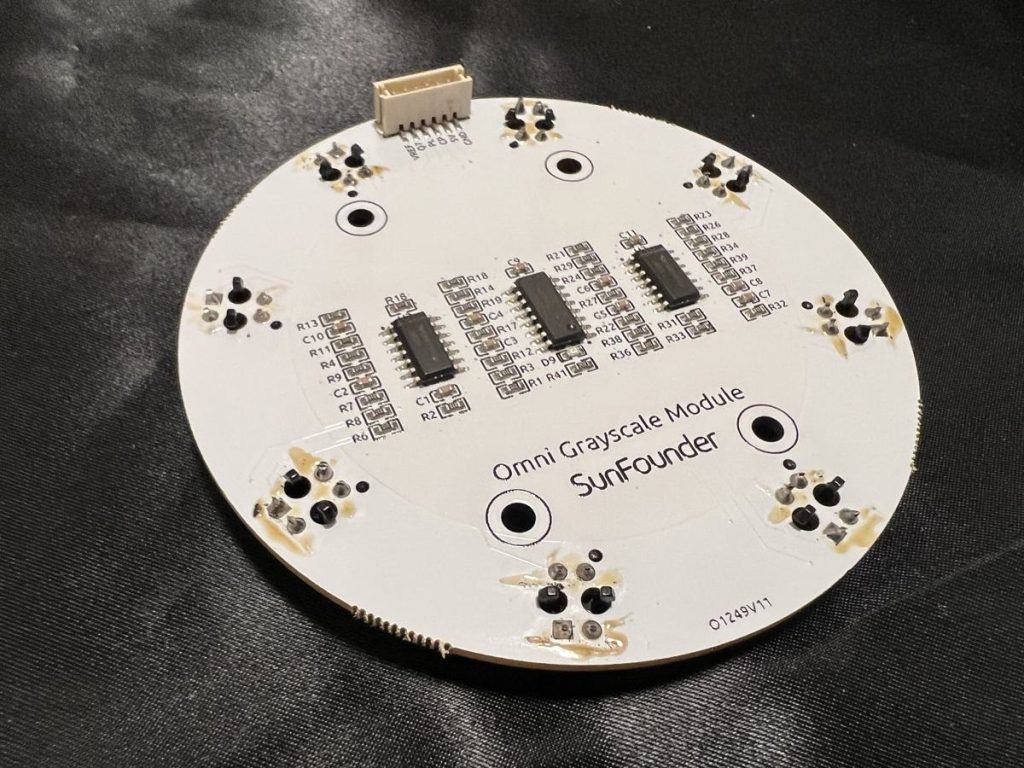
基板のコネクタに6pinのケーブルを接続します。
ライントレース用センサーの基板をH型のフレームのスペーサーに固定します。

ライントレースセンサーのケーブルを、Zeus Carシールドのコネクタに接続します。
メカナムホイールの取り付け
最後にメカナムホイールを取り付けます。
こちらが車輪となるメカナムホイールです。

DCモーターの赤丸のシャフト部分に先ほどのメカナムホイールを差し込みます。
矢印の方向からホイールを差し込みますが、モーター側のシャフトが樹脂でできているため、差し込む際はモーター側も手で抑えながら差し込んでください。
かなり力を掛けないと刺さらないため、モーター側を手で抑えないとシャフトの付け根の部分が破損する可能性があります。

写真の赤丸の位置までホイールを差し込みます。

ホイールを差し込んだら、ホイール中央の部分をねじで固定します。

以上で組み立て作業は完了です。
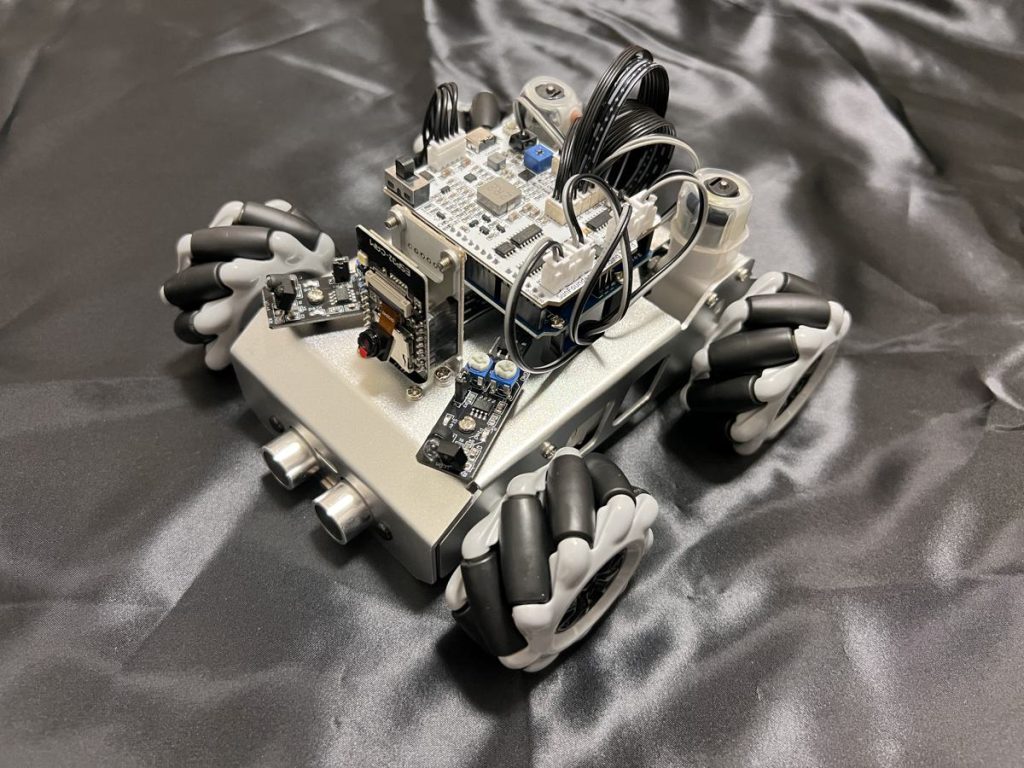
組み立てが完了した状態
こちらが組み立てが完了した状態です。
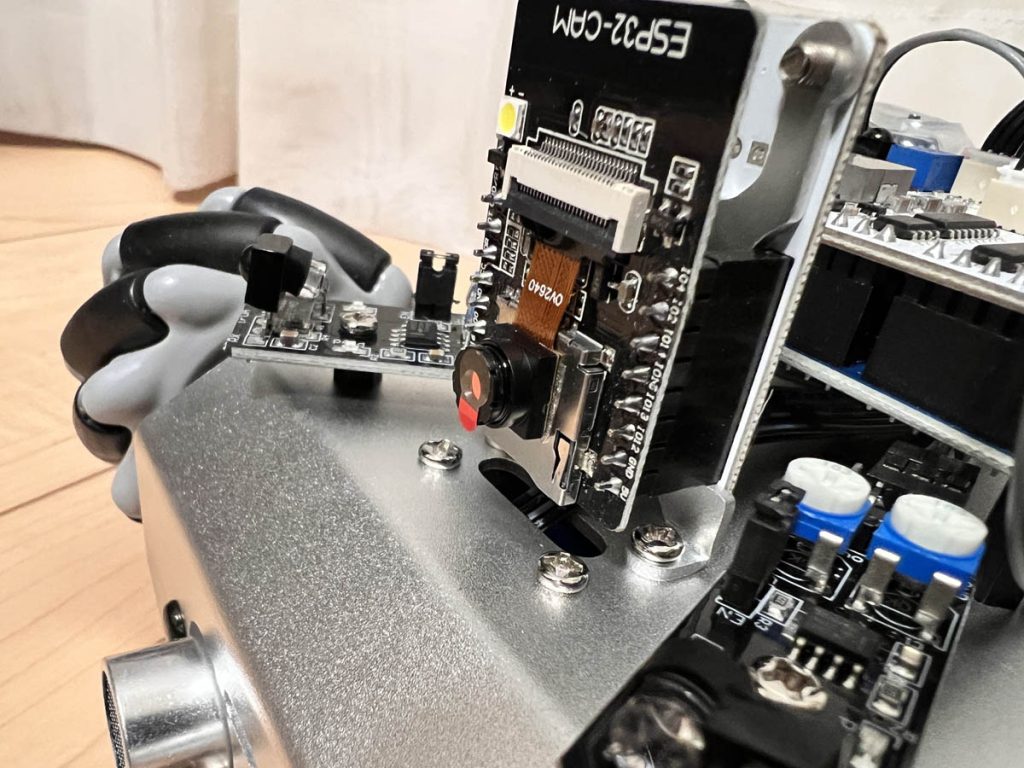
カメラについては、実際に制御ソフトウェアを動作させて、スマホのアプリからカメラ画像が正常に映るのを確認したら両面テープを貼り付けましょう。

こちらがカメラの動作確認後に、両面テープでカメラを固定した状態です。実際に使用する際はレンズの保護フィルムをはがして使用してください。
まとめ
今回はSunFounderの「Zeus Car」のパッケージ内容と組み立てについてまとめてみました。
組み立ての手軽さ、多機能なセンサー、そして自立制御のプログラミング学習に適したこの製品は、Arduinoとロボティクスに興味がある方には非常におすすめです。
また、以下の記事で効率的にPythonのプログラミングスキルを学べるプログラミングスクールの選び方について解説しています。最近ではほとんどのスクールがオンラインで授業を受けられるようになり、仕事をしながらでも自宅で自分のペースで学習できるようになりました。
スキルアップや副業にぜひ活用してみてください。

スクールではなく、自分でPythonを習得したい方には、いつでもどこでも学べる動画学習プラットフォームのUdemyがおすすめです。
講座単位で購入できるため、スクールに比べ非常に安価(セール時1200円程度~)に学ぶことができます。私も受講しているおすすめの講座を以下の記事でまとめていますので、ぜひ参考にしてみてください。

それでは、また次の記事でお会いしましょう。









コメント