今回はIntel社のRealSense D435のスペックや使い方について解説します。これから導入を検討される方、既に購入して活用方法を考えている方はぜひ参考にしてみてください。
目次
Intel RealSenseとは
Intel RealSense Depth Camera D400シリーズは、深度計測が可能なステレオビジョンの深度カメラです。

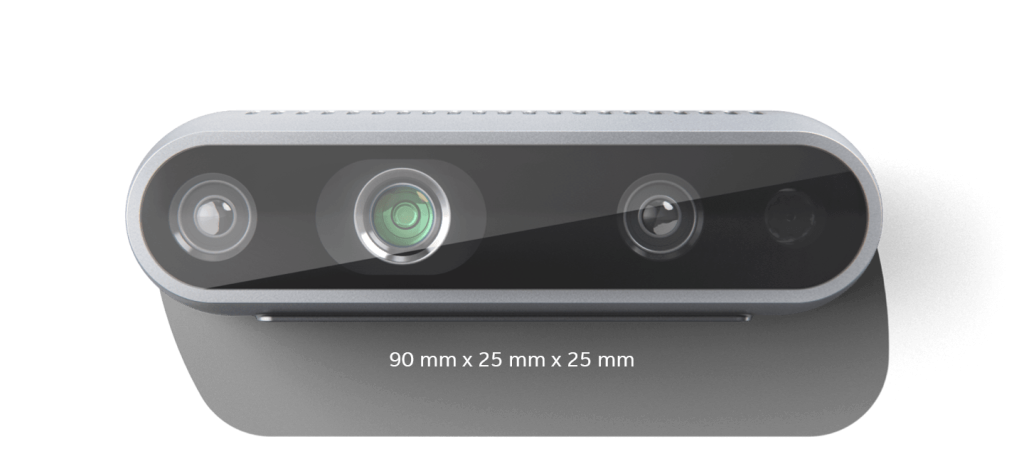
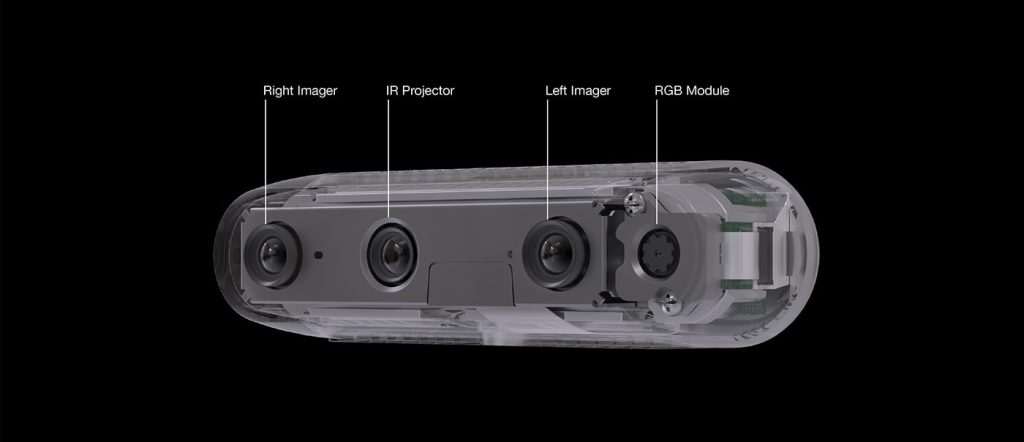
ユニット内に搭載されたステレオカメラとIR投射器により深度を計測します。計測距離は0.3m~3m、深度フレームレートは最大90fpsとなります。
深度計測はRealSense側に搭載されたプロセッサにより演算処理が行われるため、マイコンなどのエッジデバイスでもリアルタイム計測が可能です。
また開発元のIntel社からRealSense SDKが無償で公開しており、ユーザーがC++やPython、MatlabなどのプログラムからRealSenseのデバイスにアクセスすることができます。
入手先
RealSense D435はAmazon等で購入が可能です。
インテル(Intel)
¥58,800 (2025/07/01 00:34時点 | Amazon調べ)
\Amazonプライムデー先行セール開催中!/
Amazon
ポチップ
パッケージ内容
RealSense D435のパッケージ内容は以下の記事でレビューしています。
あわせて読みたい
REALSENSE Depth Camera D435をレビュー
今回はIntel社のREALSENSE Depth Camera D435を入手しましたので、レビューしたいと思います。先日Arducam製のカメラを買ったばかりですが、Twitterのフォロワーさんか…
D435のデータシートは以下の公式サイトよりダウンロードできます。
Intel RealSense D435データシート
Windows PC(x86)
ここからはWindows PC上でのRealSense D435の使い方を解説します。
Intel Realsense SDKのセットアップ
WindowsでIntel RealSense SDKをセットアップし、Pythonプログラムからアクセスする方法を解説しています。
あわせて読みたい
Intel RealSense SDKを使ってPythonからD435にアクセスする方法
今回はIntel RealSense SDKを使ってPythonのプログラムからD435にアクセスする方法を解説します。Intel RealSense D435については以下の記事で解説していますので、あわ…
YOLOv5を使用した物体検出
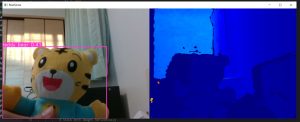
META社が公開している機械学習ライブラリPyTorchと学習モデルYOLOv5を使って、D435のRGBカメラの映像に対してリアルタイムに物体検出を行う方法を以下の記事で解説しています。
あわせて読みたい
REALSENCE D435のカメラ映像でPyTorchとYOLOv5を使ってリアルタイムに物体検出する方法
今回はIntel社のREALSENCE D435で撮影した映像でリアルタイムに物体検出する方法をまとめたいと思います。 使用するカメラ Intel REALSENCE D435 今回、物体検出の対象…
インテル(Intel)
¥58,800 (2025/07/01 00:34時点 | Amazon調べ)
\Amazonプライムデー先行セール開催中!/
Amazon
ポチップ
Jetson Nano
ここからはNVIDIA社が開発、販売しているGPU搭載組み込みボードJetson NanoでRealSense D435を使用する方法を解説します。
NVIDIA
¥35,981 (2025/07/03 10:03時点 | Amazon調べ)
\Amazonプライムデー先行セール開催中!/
Amazon
ポチップ
Jetson Nanoにいては以下の記事でまとめていますので、あわせてご覧ください。
あわせて読みたい
エッジコンピューティングに最適!NVIDIA Jetsonの活用方法
NVIDIA社が開発販売しているシングルボードコンピュータ、Jetsonの活用方法について解説します。これからエッジデバイスで機械学習系のアプリケーションを実装してみた…
Intel RealSense SDKのセットアップ
Jetson NanoのJetPack上でRealSense SDKをセットアップする方法を以下の記事で解説しています。
あわせて読みたい
Jetson NanoでIntel RealSense D435のSDKをインストールする方法
今回はIntel RealSense D435をJetson Nanoで使用するための、RealSense SDKをインストールする方法を解説します。また、Jetson Nanoに関する記事を以下のページでまとめ…
Librealsenseのセットアップ
Jetson NanoでPythonのプログラムからRealSenseのデバイスにアクセスするためのライブラリ、Librealsenseをセットアップする方法を解説しています。
あわせて読みたい
Jetson Nanoでpythonから使えるライブラリlibrealsenseをセットアップする方法
今回はIntel社のカメラモジュールRealSense D435をPythonのコードからアクセスする際に必要となるライブラリ、librealsenseをセットアップする方法について解説します。…
インテル(Intel)
¥58,800 (2025/07/01 00:34時点 | Amazon調べ)
\Amazonプライムデー先行セール開催中!/
Amazon
ポチップ
YOLOv5を使用した物体検出
Jetson NanoでMETA社が公開している機械学習ライブラリPyTorchと学習モデルYOLOv5を使って、D435のRGBカメラの映像に対してリアルタイムに物体検出を行う方法を以下の記事で解説しています
あわせて読みたい
Jetson Nanoに接続したRealsenseのRGBカメラでYOLOv5を使って物体検出する方法
今回はJetson Nanoに接続したIntel社のRealSenseのRGBカメラの映像に対して、リアルタイム物体検出する方法を解説します。物体検出には機械学習ライブラリPyTorchと学習…
Depthカメラを使用した距離計測
YOLOv5で検出したオブジェクトとの距離をRealSenseのDepthカメラによって計測する方法を以下の記事で解説しています。
あわせて読みたい
Jetson Nanoに接続したRealSenseのDepthカメラで距離を計測する
今回はJetson Nanoに接続したRealSenseのRGBカメラ映像に対してYOLOv5で物体検出を行い、検出したオブジェクトとの距離をDepthカメラで計測する方法を解説したいと思い…
著:小枝正直, 著:上田悦子, 著:中村恭之
¥3,080 (2025/07/03 03:30時点 | Amazon調べ)
\Amazonプライムデー先行セール開催中!/
Amazon
ポチップ
まとめ
今回はIntel社のRealSense D435に関する当ブログ内の記事をまとめてみました。今後はROSと連携させ、ロボットに搭載して活用していく予定です。
インテル(Intel)
¥58,800 (2025/07/01 00:34時点 | Amazon調べ)
\Amazonプライムデー先行セール開催中!/
Amazon
ポチップ
また、以下の記事で効率的にPythonのプログラミングスキルを学べるプログラミングスクールの選び方について解説しています。最近ではほとんどのスクールがオンラインで授業を受けられるようになり、仕事をしながらでも自宅で自分のペースで学習できるようになりました。
スキルアップや副業にぜひ活用してみてください。
あわせて読みたい
Pythonが学べるプログラミングスクール5選 | 初心者にもおすすめ
プログラミングスクールってたくさんあって、どのスクールを選んだらいいのかな? 自分のキャリアアップに必要なカリキュラムがあるプログラミングスクールを探したいん…
スクールではなく、自分でPythonを習得したい方には、いつでもどこでも学べる動画学習プラットフォームのUdemyがおすすめです。
講座単位で購入できるため、スクールに比べ非常に安価(セール時1200円程度~)に学ぶことができます。私も受講しているおすすめの講座を以下の記事でまとめていますので、ぜひ参考にしてみてください。
あわせて読みたい
Python初心者におすすめ! いつでもどこでもスマホで学べるUdemy講座6選
Udemyってどんなサービスなの? 仕事の案件で機械学習を扱うことになったけど、どうやって勉強したらしいんだろう? こんな悩みを解決します。 この記事でわかること Ud…
それでは、また次の記事でお会いしましょう。
NVIDIA
¥35,981 (2025/07/03 10:03時点 | Amazon調べ)
\Amazonプライムデー先行セール開催中!/
Amazon
ポチップ
著:上田 隆一
¥3,663 (2025/07/04 04:03時点 | Amazon調べ)
\Amazonプライムデー先行セール開催中!/
Amazon
ポチップ




















コメント