ロボット– category –
-

Ubuntu 22.04LTSdesktopでROS2Humbleをインストールする方法を解説
今回はロボットのホストとなるPC側でUbuntu LinuxにROS 2 Humble Hawksbillをインストールするための手順を解説します。 インストールするPCは専用機を用意するのは大変... -
Lidar ld06のドライバをインストールする方法
今回は「Okdo Lidar Module with Bracket開発キット LiDAR_LD06」を使用する際に必要となるld06のドライバをインストールする方法を解説します。 私の環境でセットアッ... -
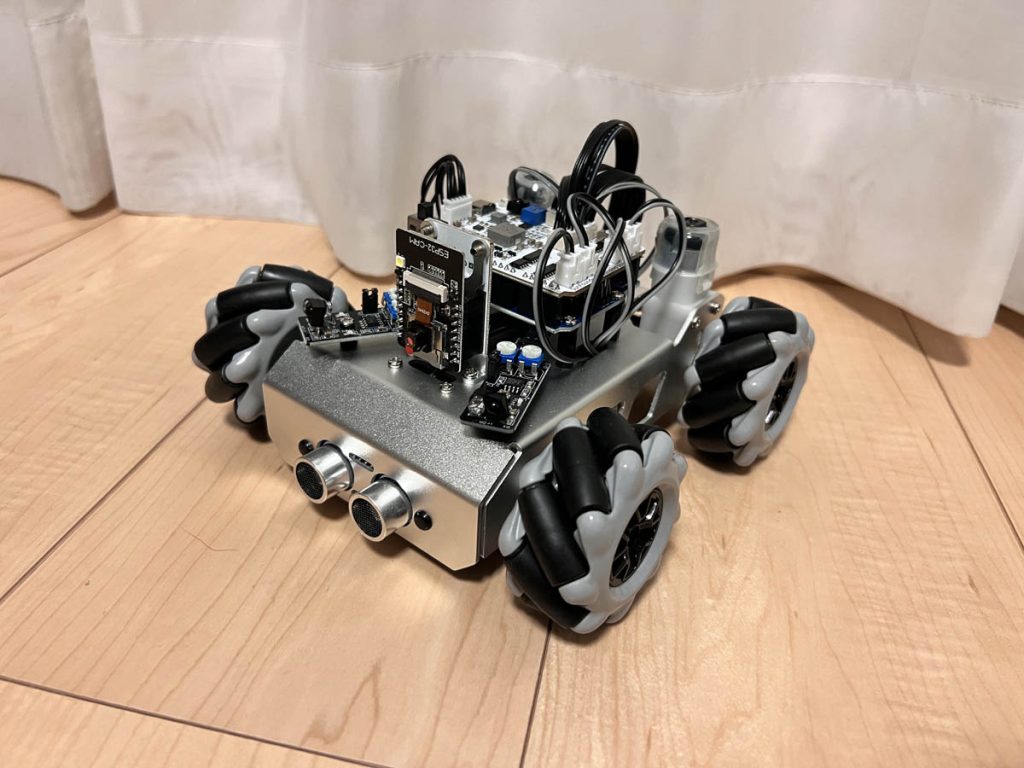
Raspberry PiからZeusCarを制御する方法(Arduino編)
今回はSunFounder製のメカナムホイールロボットZeusCarをRaspberry Piから制御する方法について解説します。 ZeusCarのコントローラーはArduinoですが、処理能力の高いR... -
RaspberryPiで制御する犬ロボットPiDogをレビュー
PiDogは、SunFounder社が販売するRaspberry Piで制御する犬型ロボットです。この犬ロボットは各関節にサーボモーターを搭載し、生きている犬であるかのようなリアルなモ... -
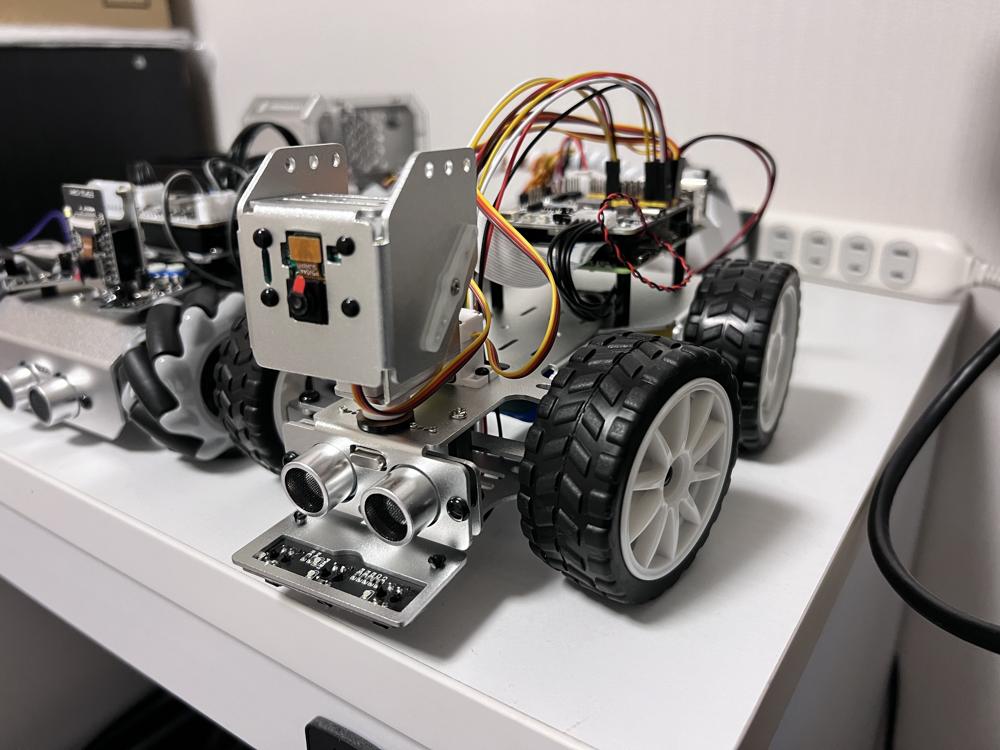
PiCar-Xの組み立て方を解説 | Raspberry Piで制御するスマートロボットカー
今回はSunFounder社から発売されているRaspberry Piで制御するスマートロボットカーPiCar-Xの組み立て方法について解説します。 手戻りが少ない手順や注意点についてま... -
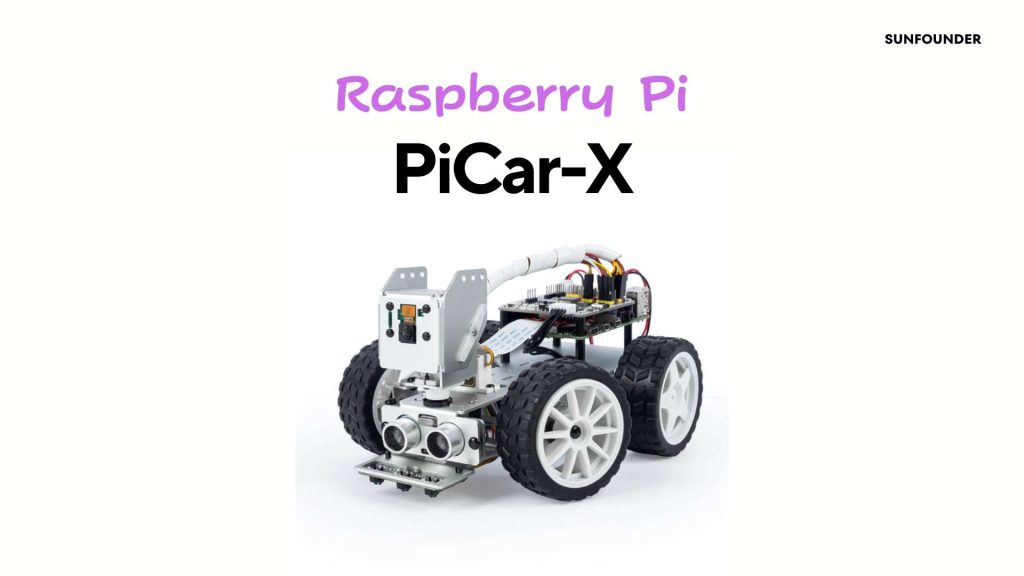
Raspberry Piで制御するスマートロボットカーPiCar-Xをレビュー
PiCar-Xは、SunFounder社が販売するRaspberry Piで制御するスマートロボットカーです。このロボットカーは2つの駆動モータと、ステアリング用サーボモーターを搭載し、... -
SunFounder Zeus Carの組み立て方法について解説
今回は、SunFounder製のArduinoを搭載したロボットカー「Zeus Car」の組み立てについて解説します。この製品は組み立てが簡単で、様々なセンサーを搭載しています。また... -
Intel RealSense D435 距離計測が可能なステレオカメラの活用法
今回はIntel社のRealSense D435のスペックや使い方について解説します。これから導入を検討される方、既に購入して活用方法を考えている方はぜひ参考にしてみてください... -
Intel RealSense SDKを使ってPythonからD435にアクセスする方法
今回はIntel RealSense SDKを使ってPythonのプログラムからD435にアクセスする方法を解説します。Intel RealSense D435については以下の記事で解説していますので、あわ... -
REALSENSE Depth Camera D435をレビュー
今回はIntel社のREALSENSE Depth Camera D435を入手しましたので、レビューしたいと思います。先日Arducam製のカメラを買ったばかりですが、Twitterのフォロワーさんか... -
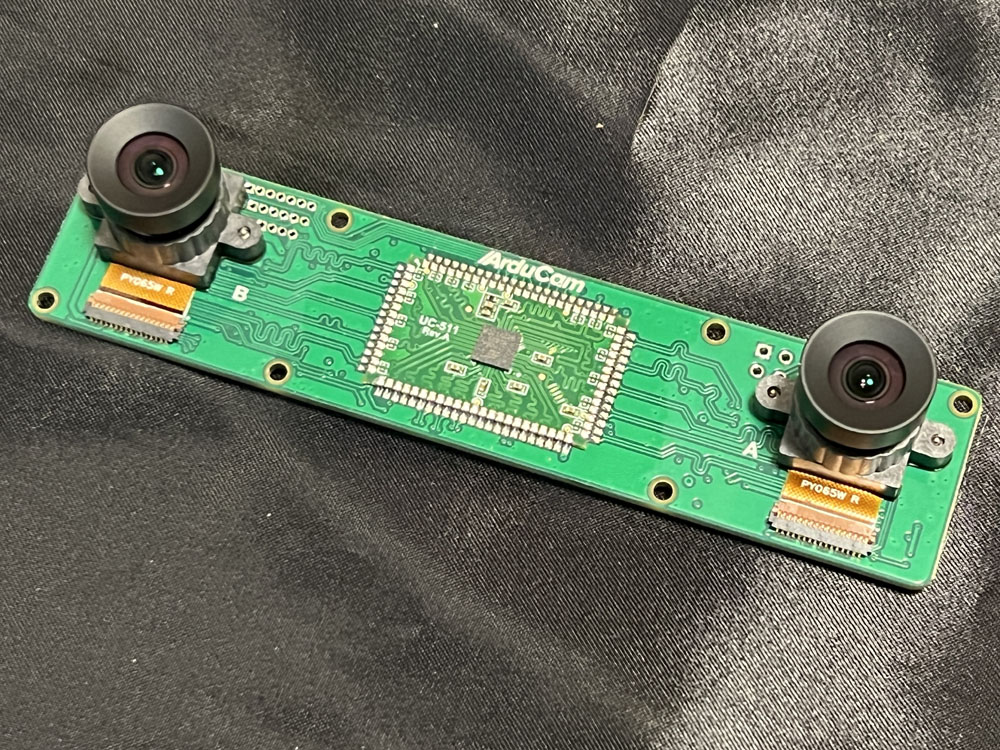
Arducam製のOV9281搭載ステレオカメラを購入しました
今回はJetsonやRaspberry Piで使用できるステレオカメラを購入しましたので、レビューしていきたいと思います。 【購入したステレオカメラ】 今回購入したのはArducamと... -
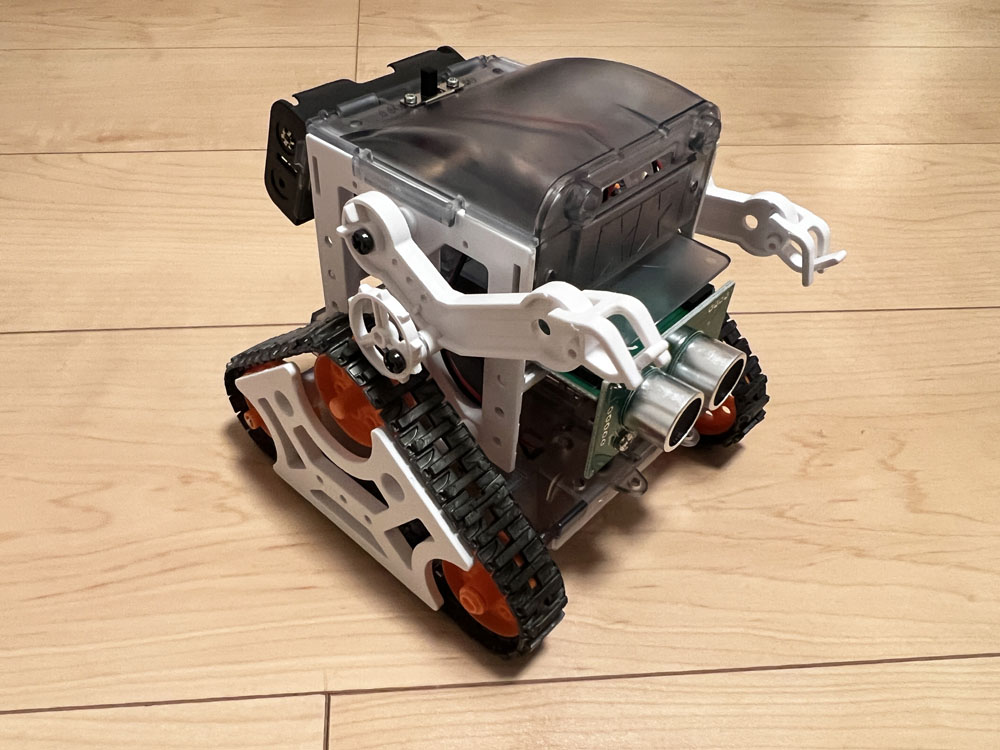
タミヤ プログラミング工作シリーズ クローラータイプのキットを組み立ててみました
今回は先日キット内容をレビューした「プログラミング工作シリーズ No.01 マイコンロボット工作セット クローラータイプ」を組み立ててみましたので、動作テストも含め...