今回はIntel社のREALSENSE Depth Camera D435を入手しましたので、レビューしたいと思います。
先日Arducam製のカメラを買ったばかりですが、Twitterのフォロワーさんから深度計測するならD435がオススメと伺ったので、購入してみました。
また、当ブログ内でD435に関する解説記事を以下のページでまとめていますので、あわせてご覧ください。

REALSENSE Depth Camera D435
Intel社のREALSENSE Depth Camera D435は深度計測が可能なステレオビジョンの深度カメラです。
リアルタイムのステレオ深度データを計算する 28 ナノメートル (nm) プロセス テクノロジに基づくビジョンプロセッサを搭載しています。
深度計測の処理はD435側で実行されますので、Raspberry PiやJetsonなどのマイコンからも使用することが可能です。

また、開発者向けにIntel RealSense SDK 2.0が公開されており、このSDKを使ってC++やPythonでユーザーがREALSENSEを使ったアプリケーションを開発することができます。

パッケージ内容
実際に購入したD435のパッケージ内容を見ていきたいと思います。ちなみに今回、私は中古のものを購入しました。Amazonなどでも中古だと25000円くらいから購入できます。
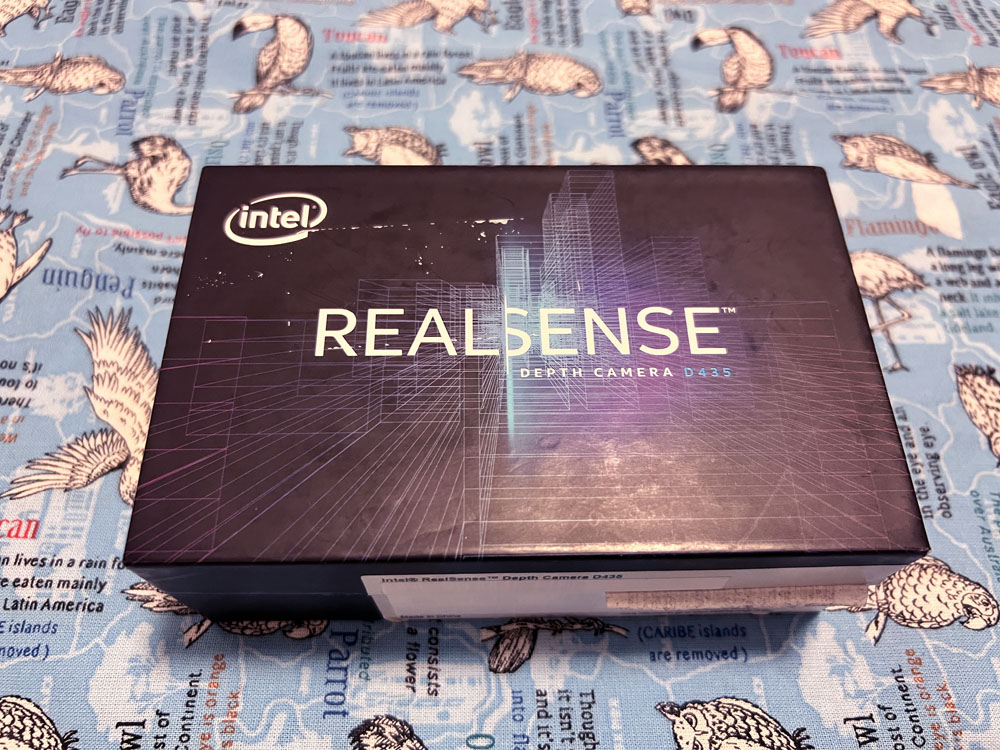
こちらがD435の箱です。
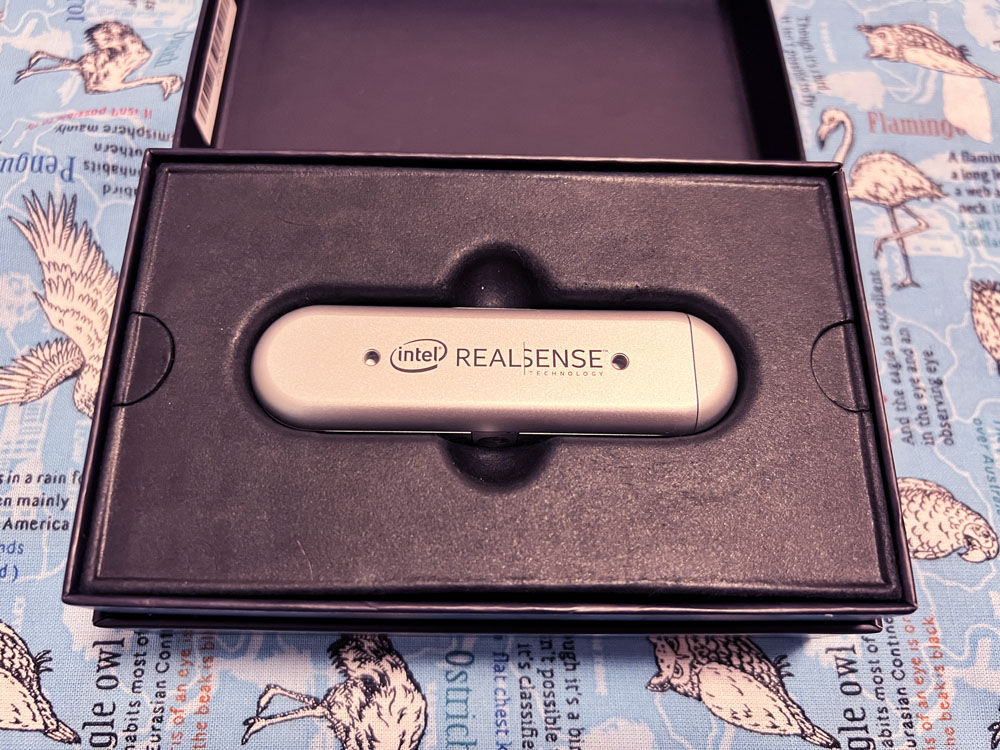
開けると箱が2段になっており、上段にはD435の本体が入っています。
下段には付属品が入っています。

今回私が購入した中古品には以下の付属品がありました。PCやマイコンと接続するUSBケーブル、三脚、取扱説明書です。

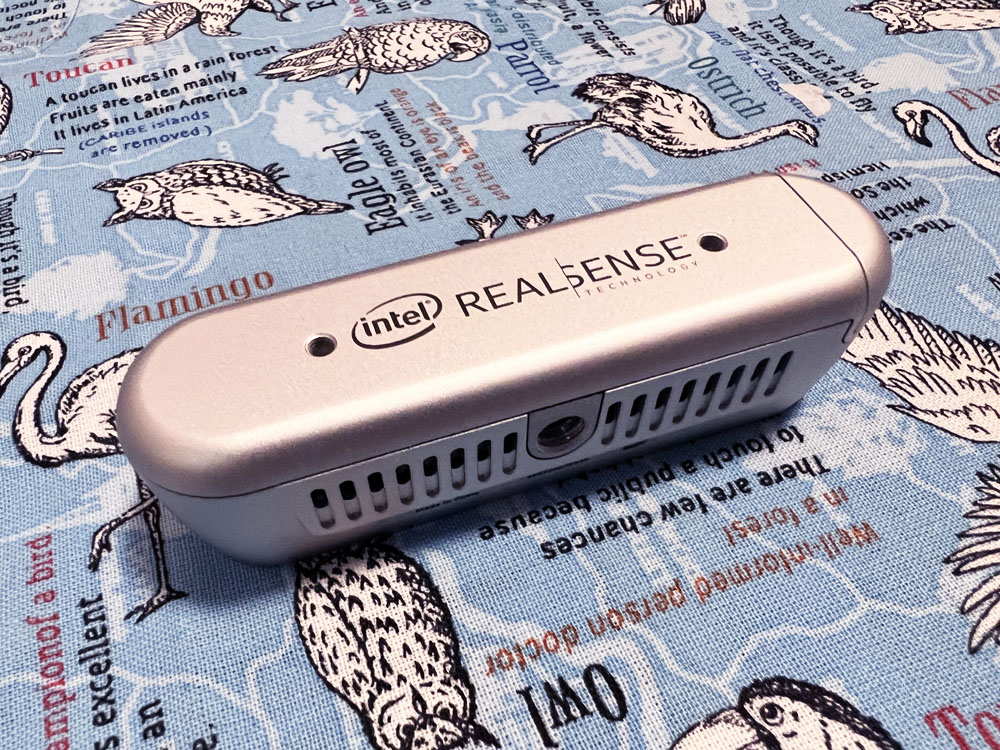
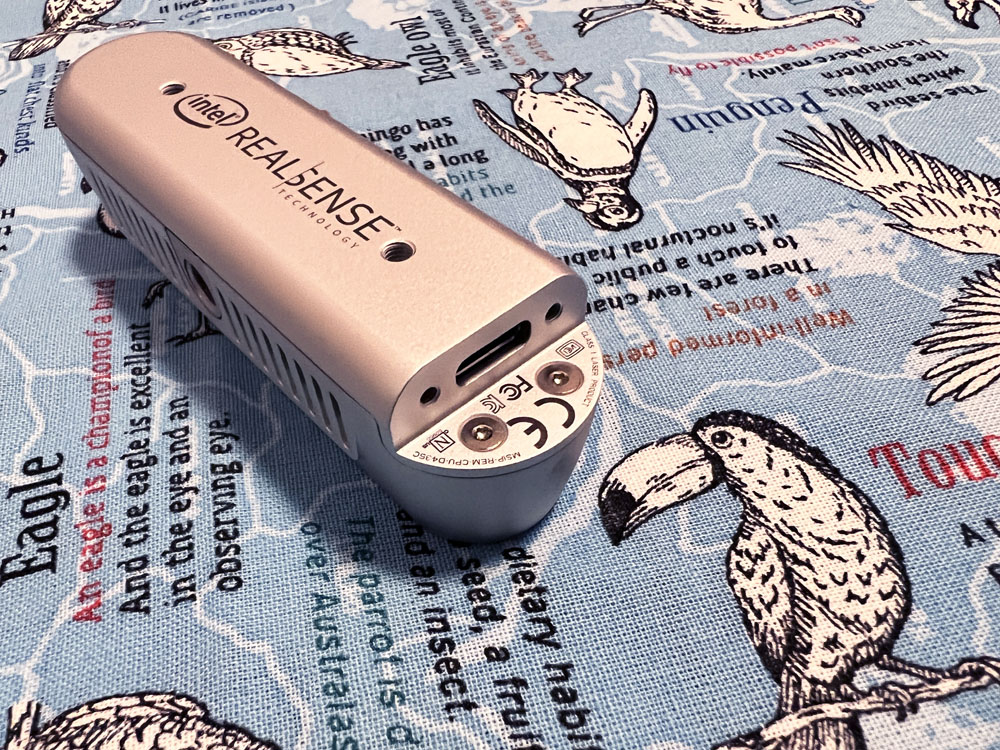
こちらがREALSENSE Depth Camera D435の本体です。前面には各種センサーが並んでいます。

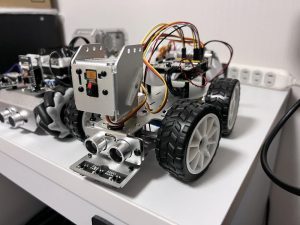
裏面にはREALSENSEのロゴと固定するためのネジ穴がありました。このネジ穴を使ってロボットに固定する予定です。
上面には放熱のための穴が開いています。

下面には放熱のための穴と三脚を固定するためのネジ穴がありました。

裏面端のカバーを取り外すとUSB Type-Cのコネクタがあります。
動作確認
さてここからは実際に動作確認をしていきます。
今回は開発をしませんので、Intelが公開しているViewerを使ってみたいと思います。
Viewerのダウングレード
以下のリポジトリのページに行き、「Assets」にある「Intel.RealSense.Viewer.exe」をダウンロードしてください。

Viewerの実行
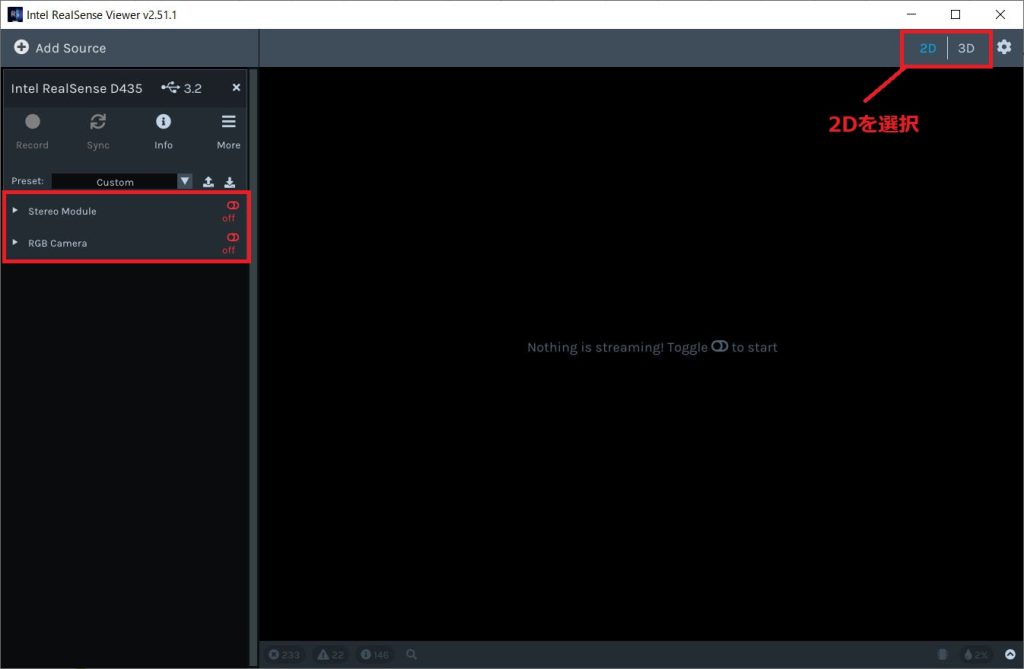
先ほどダウンロードしたViewのexeファイルを実行すると以下のウインドウが表示されますので、右上の「2D」をクリックします。
その後、左側の「Stereo Module」をONにすると深度カメラが、「RGB Camera」をオンにすると通常のカメラが起動できます。
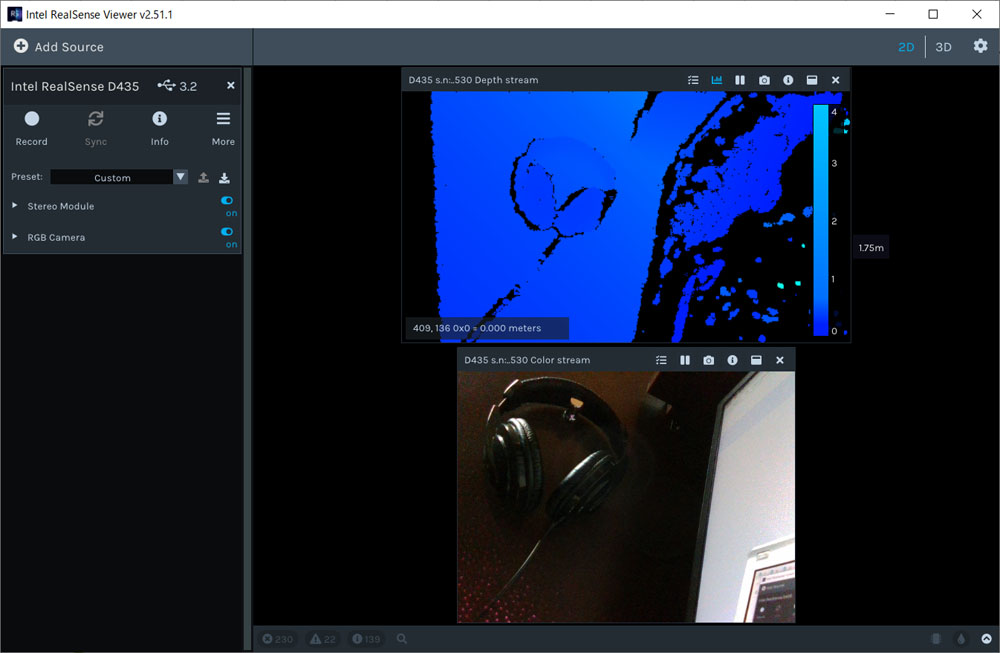
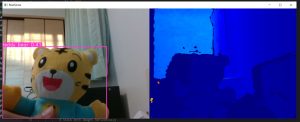
こちらがカメラを起動した状態です。
深度カメラは近い場所が青で、遠い場所が赤で表示されます。すぐ近くの壁とヘッドホンを映しているので、画面全体が青く表示されています。
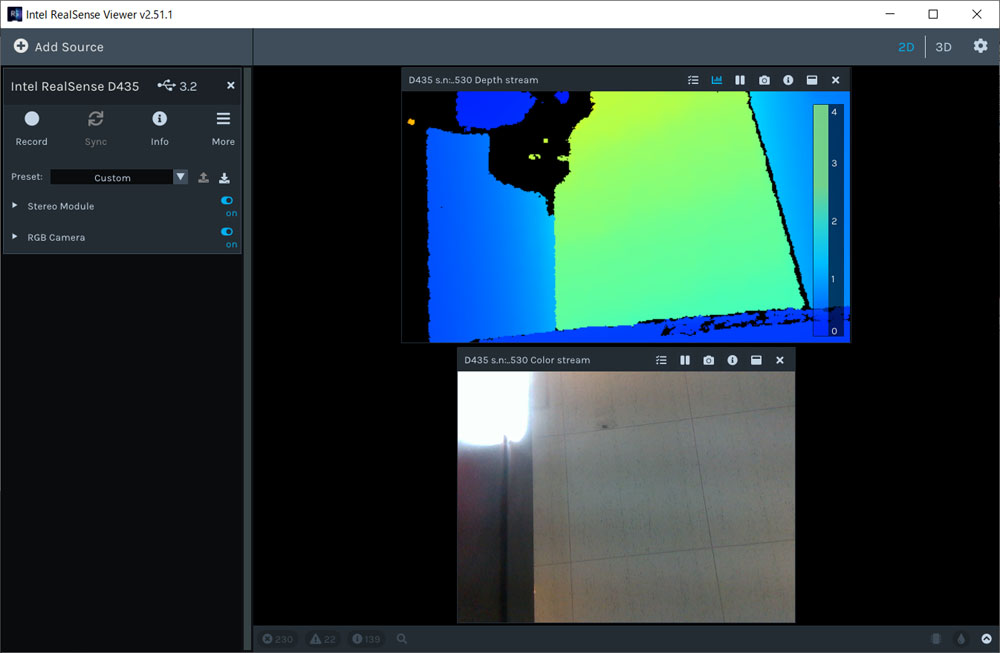
こちらが天井を映した状態です。天井部分は少し遠いので黄緑色で表示されいます。
関連記事
D435をPythonのプログラムから使用する方法を以下の記事で解説しています。

D435の映像からリアルタイムに物体検出する方法を以下の記事で解説しています。
まとめ
今回はIntel社のREALSENSE Depth Camera D435をレビューしてみました。
深度計測がカメラモジュール側で行えるのは、Raspberry Piなど非力なマイコンでも処理負荷を抑えることができるため非常に良いなと感じました。
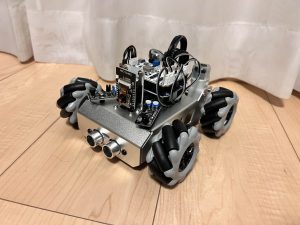
今後はこのカメラをロボットに搭載して自律制御などに活用していきたいと思います。
それでは、また次の記事でお会いしましょう。






コメント