Python– tag –
-

【Python】ノイズ対策に有効な移動平均フィルタを実装する方法
今回はPythonで移動平均フィルタを実装する方法についてまとめたいと思います。 【移動平均フィルタとは】 移動平均フィルタとはローパスフィルタの一種で、時系列デー... -
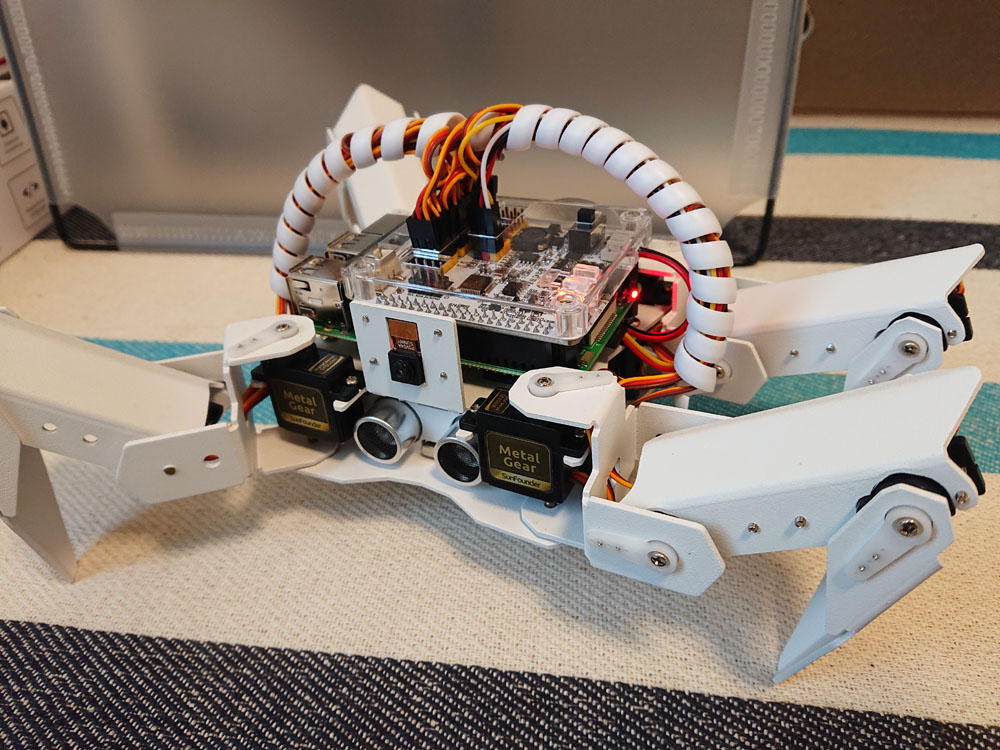
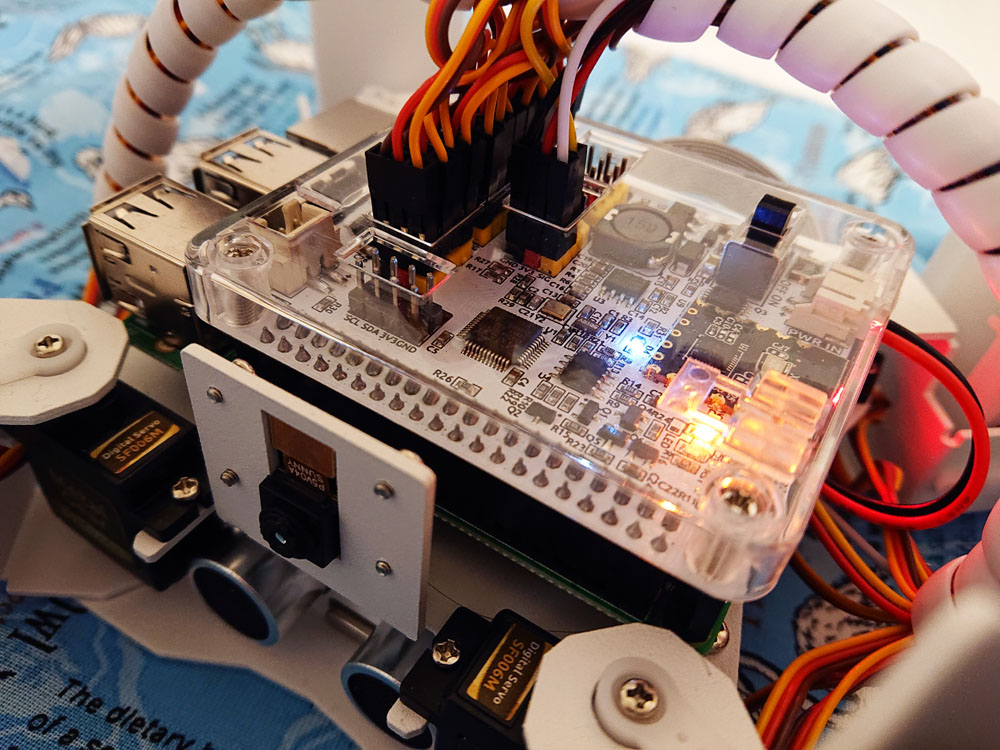
Raspberry PiベースのロボットPiCrawlerをGUIアプリケーションから操作する
今回は当ブログで作成しているRaspberry PiベースのスパイダーロボットPiCrawlerを、Pythonで記述したGUIプログラムから制御できるようにしたため、記事にまとめたいと... -
【Raspberry Pi】マルチコア、マルチプロセスで共有メモリーを使ったプロセス間通信を実装する
今回はPythonでマルチプロセスのプログラムを実行する際に行う、プロセス間通信の実装方法について書きたいと思います。ライブラリはmultiprocessingを使用します。これ... -
【Python】PySimpleGUIでデスクトップGUIアプリケーションを作成する
今回はPythonでデスクトップGUIアプリケーションを実装する方法について書きたいと思います。 【やりたいこと】 現在、当サイトで製作しているRaspberry Piベースのスパ... -
Raspberry Piのマルチコア並列処理でロボットを制御する
今回は先日記事にしたRaspberry Piのマルチコア、マルチプロセスによる並列処理で実際にロボットを制御してみたいと思います。言語はPythonになります。 【並列処理でや... -
【Raspberry Pi】爆速!ラズパイでマルチコア並列コンピューティング
Raspberry Pi 3、4のSoCでは、4つのCPUコアを搭載しています。シングルコアのCPUではマルチスレッドで複数の処理を実行したい場合は、処理を複数のスレッドに分けて、順... -
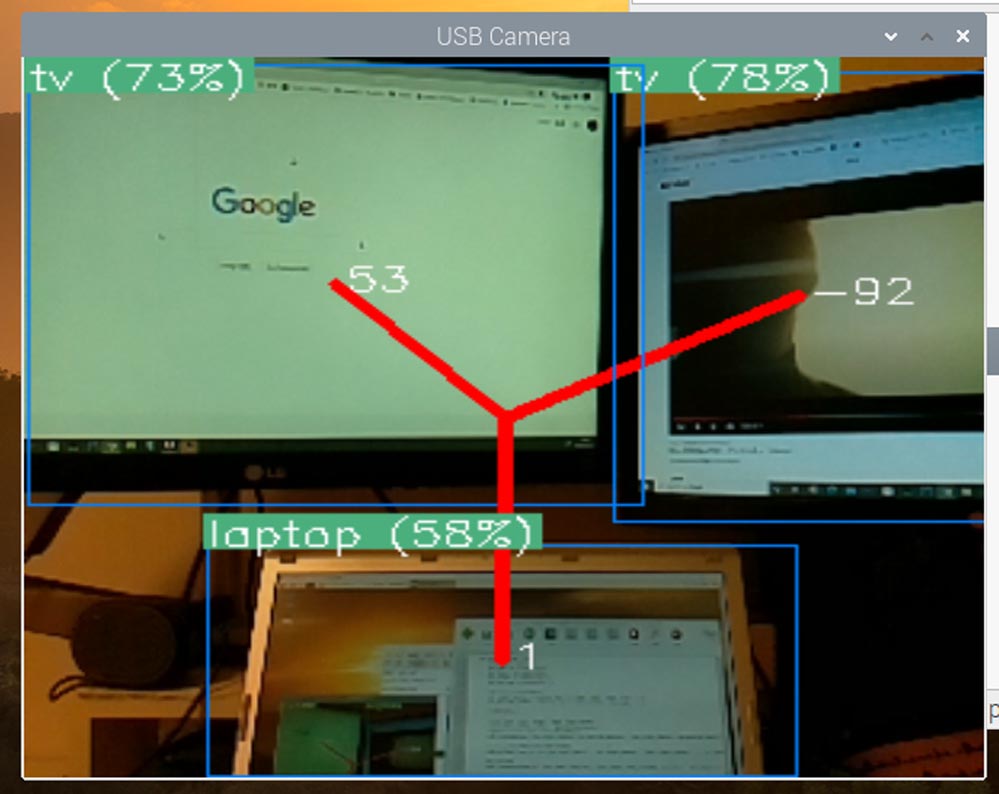
【Raspberry Pi】ディープラーニングで検出したオブジェクトの位置情報を取得する
今回はロボットに搭載するディープラーニングを使った画像処理アプリケーションが完成したので記事にしたいと思います。以前書いたTensorFlow Liteによる物体検出を行う... -
【Python】除算時の型変換によるエラーの解消方法
今回はPythonの型に関するエラーについて書きたいと思います。ロボットの画像処理プログラムで座標を計算する処理を実装したところ、型の不一致によるエラーが発生した... -
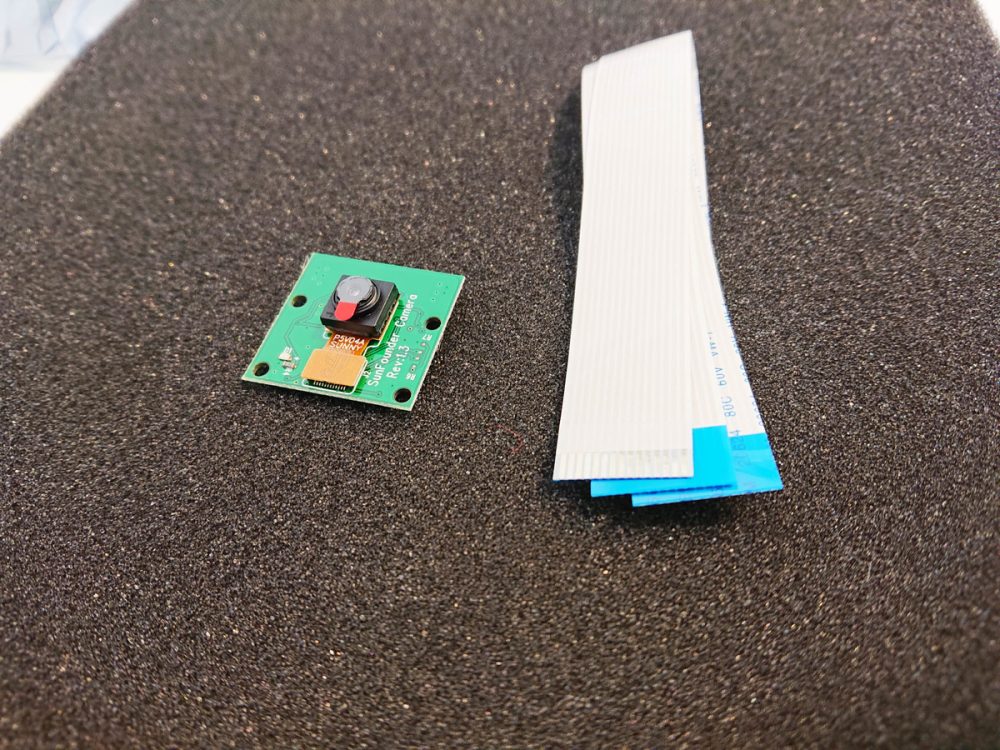
【Raspberry Pi】カメラモジュールの解像度、フレームレートを確認する
リモートデスクトップでラズパイに接続してカメラの映像を見た時の「カクカク」をなんとかしたい!ということで、今回はRaspberry Piのカメラモジュールを使用した際の... -
【Raspberry Pi】ラズパイのカメラモジュールで動画撮影をする方法
今回はラズベリーパイのカメラモジュールを使用して、動画を撮る方法について解説していきます。撮影には画像処理ライブラリOpenCVを使用します。また、OpenCVの活用事... -
UbuntuでTensorFlowをセットアップする
こんにちは、むらさんです。今回はGoogleが公開している機械学習のソフトウェアライブラリ、TensorFlowをUbuntu Linuxでセットアップする手順について書きたいと思いま... -
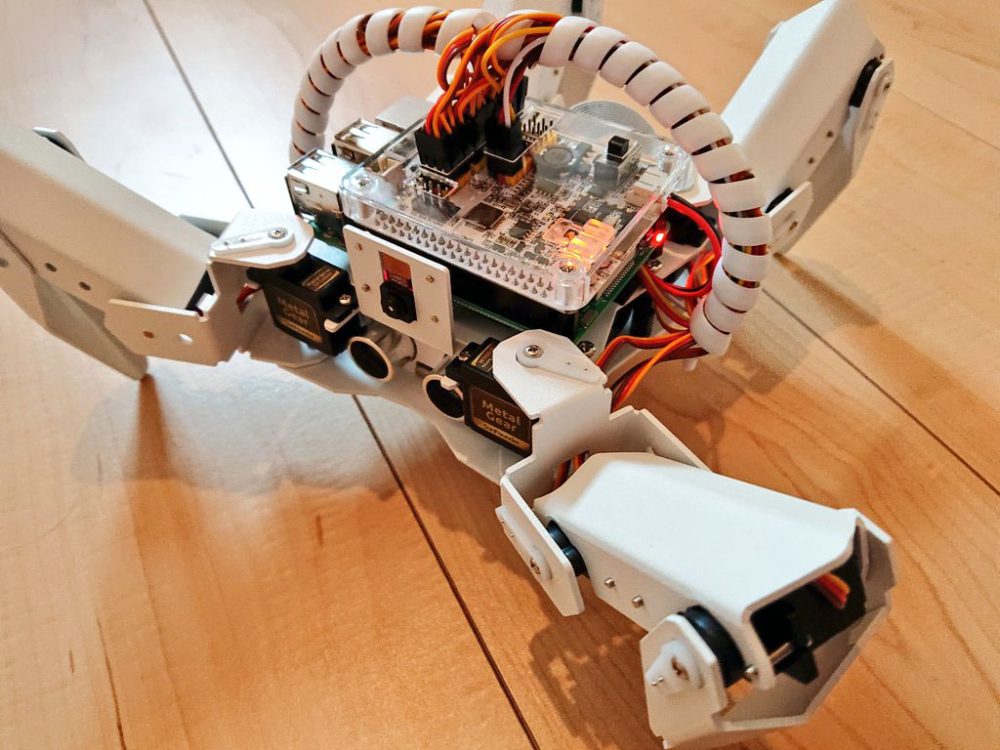
【Raspberry Pi】【ロボット】HC-SR04で障害物を検出する
今回はラズパイベースのロボット、PiCrawlerに搭載されている距離センサーHC-SR04を使って障害物検出をしてみたいと思います。 【PiCrawlerについて】 Raspberry Piをコ...