プログラミング– tag –
-

スマホからRaspberry PiにSSHしたら日本語が打てない問題を解決する方法を解説
Raspberry Pi をヘッドレス(モニターなし)で運用している方、スマホから SSH 接続したときに 日本語が入力できなくて困った ことはありませんか? スマホの... -
Claude Code が「command not found」になる原因と復旧方法【nvm環境編】
今回はClaude Codeなどのターミナルで使用するAIエージェントの環境で発生するエラーと対策について解説します。 先日まで正常に使えていた claude コマンドが、ある日... -
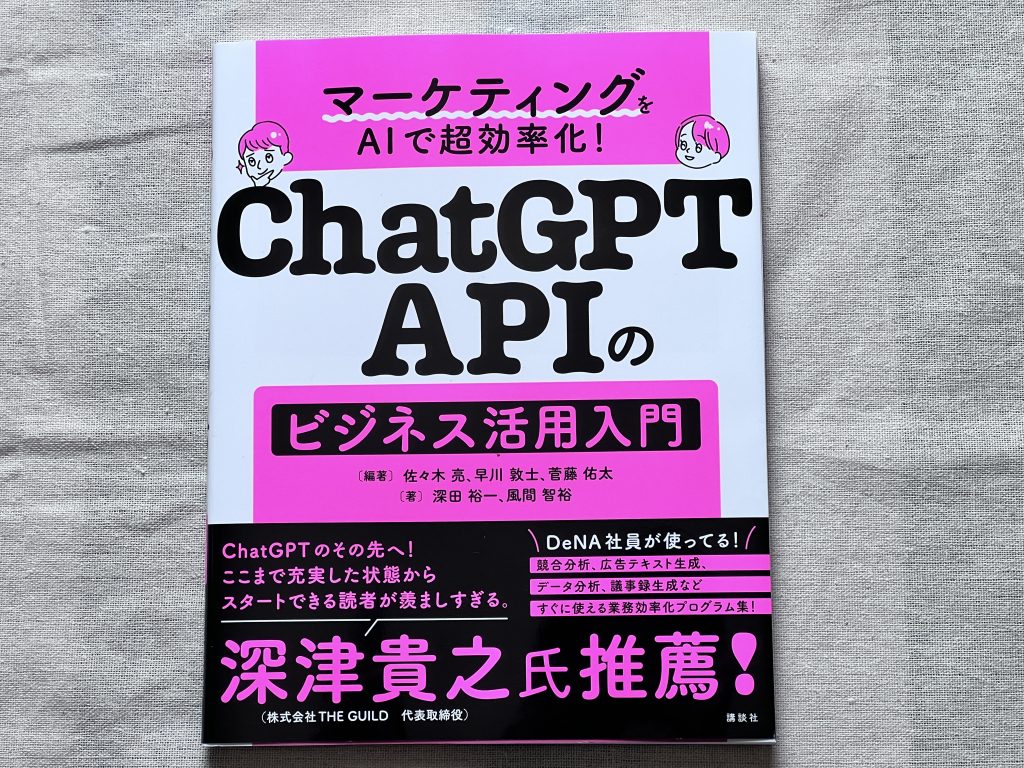
「マーケティングをAIで超効率化! ChatGPT APIのビジネス活用入門」をレビュー
本記事は、株式会社講談社サイエンティフィク様より献本いただいた『マーケティングをAIで超効率化! ChatGPT APIのビジネス活用入門』をもとに執筆しています。 私自身... -
VS Code+WSLでClaude Codeの「アップデート要求ループ」を解決した手順まとめ
VS Code の統合ターミナル (WSL) 上で Claude Code CLI を使用中、claude update を繰り返してもバージョンが更新されず、起動時に「1.0.24以上が必要」というエラーが... -
WSL環境下のClaude Codeインストール手順とトラブルシューティング
本記事では、Windows 環境で Error: Claude Code is not supported on Windows. Claude Code requires macOS or Linux to run properly. というエラーが発生した場合の... -
VS CodeとWSL (Ubuntu) を連携|ターミナルでLinux環境を快適操作【設定手順ガイド】
Windows上で開発を行っているけれど、Linuxのコマンドラインツールや開発環境を使いたい…そんな悩みを解決するのがWSL (Windows Subsystem for Linux) です。 さらに、V... -
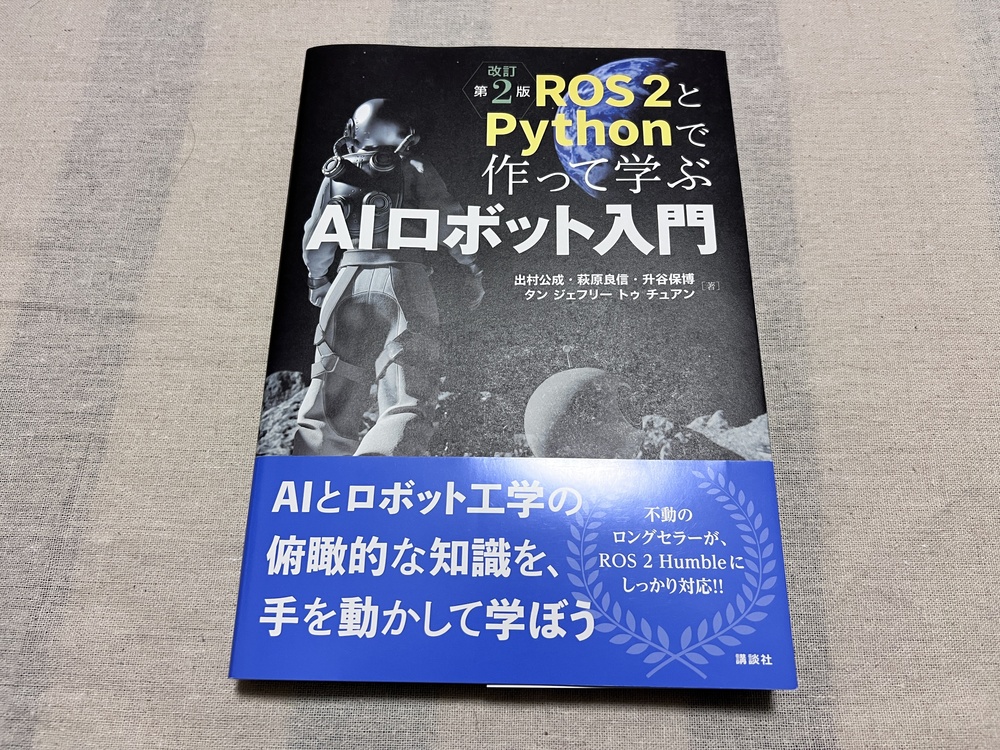
『ROS2とPythonで作って学ぶAIロボット入門』でロボット開発の基礎から応用までを学ぶ
今回は講談社サイエンティフィク様から『ROS2とPythonで作って学ぶAIロボット入門』を献本頂きましたので、内容についてレビューさせて頂きます。 私自身、ロボティクス... -
OpenAIのLLMをAPIを使ってPythonで利用する方法:サンプルコード解説
本記事では、OpenAIの大規模言語モデル(LLM) をPythonコードから利用する方法について解説します。具体的には、OpenAI API を使用して GPT-4 モデルと対話し、テキス... -
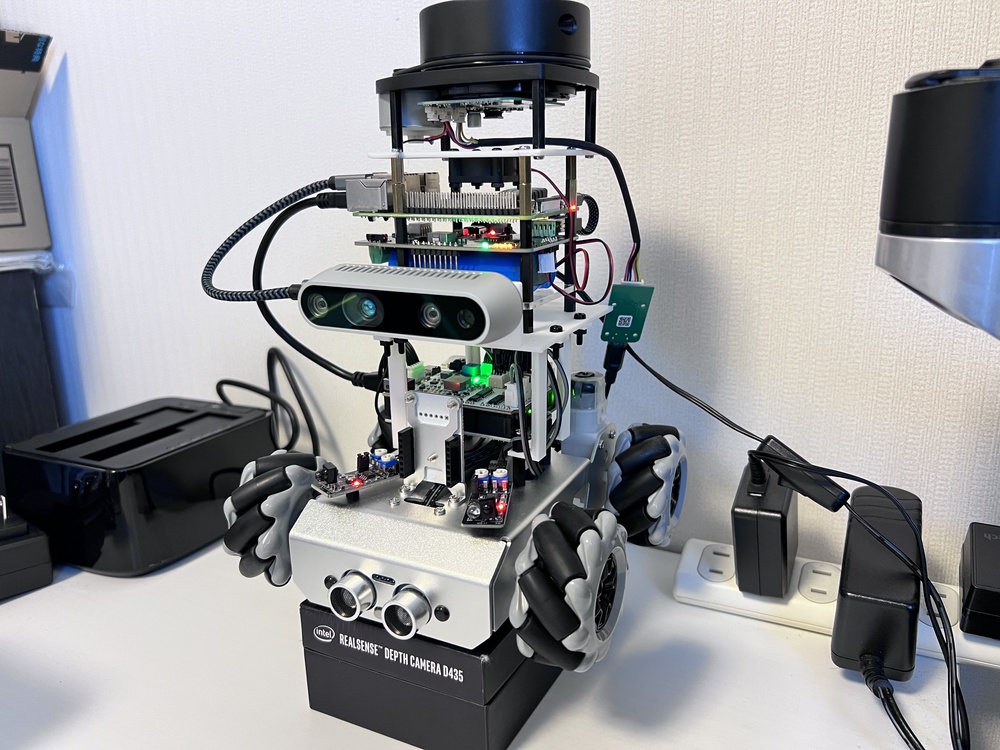
ZeusCarにRaspberry PiとROS2を搭載してPCから制御する方法
本記事では、Raspberry Pi (Ubuntu Server ) と PC (Ubuntu Desktop) でROS 2 Humble を使用してロボットを制御するシステムの構築手順をまとめます。 SunFounderから発... -
ROS2 HumbleでSubscriberノードの構築と通信方法を解説
この記事は、Raspberry Pi 4にインストールしたROS2 HumbleでSubscriberノードを作成し、Publisherノードとの通信に成功するまでの全ての手順を、準備から実行までを解... -
エッジAI入門!Raspberry Piを使ってAI開発に挑戦してみよう【Udemyおすすめ動画講座3選】
近年、AI技術の進化とともに、エッジデバイスへのAI実装が注目されています。 特に、手軽に扱える Raspberry Pi は、AIとIoTの世界をつなぐ強力なツールとして、多くの... -
Raspberry Pi 5 Hailo-8L AIアクセラレータでカメラ映像をリアルタイムにオブジェクト検出する方法
近年、エッジデバイスでの高速な物体検出が注目されています。 今回は、Raspberry Pi 5にUSB接続されたWebカメラからリアルタイムに映像を取得し、Hailo-8L AIアクセラ...