Okdo LiDAR Module with Bracket開発キットのld06 LiDARを使用するために必要なドライバのセットアップ方法について解説します。
私の環境で発生したエラーとその対処方法についても記載していますので、同じようなエラーが発生した方はぜひ試してみてください。
ROSのセットアップ
ld06 LiDARドライバを動作させるためには、事前にROSをセットアップしておく必要があります。
ROSのセットアップ方法については、以下の記事で解説していますので、あらかじめ済ませておいてください。


ld06 LiDARドライバのダウンロードと実行
ここからは実際にld06 LiDARドライバをセットアップするための手順を解説します。
ドライバのダウンロードと実行手順
まず以下のコマンドを実行し、ドライバのダウンロードとセットアップを実行します。
sudo curl -O https://raw.githubusercontent.com/LetsOKdo/ld19/master/lidar_driver_setup.sh以下のように実行権限に関するエラーが出る場合は、実行権限を付与します。
mkdir: ディレクトリ `ld06' を作成できません: 許可がありません以下のコマンドを実行して権限を付与。
sudo chmod +x lidar_driver_setup.sh再度セットアップスクリプトを実行します。
sudo ./lidar_driver_setup.shセットアップ中に発生したエラー
私の環境では、以下のようにcatkin_makeが無いというエラーが発生しました。
+ grep -q Raspberry /proc/cpuinfo
+ echo 'Running on a Raspberry Pi'
Running on a Raspberry Pi
+ WORK_DIR=ld06
+ mkdir ld06
+ echo 'Clone the driver repo'
Clone the driver repo
+ git clone https://github.com/LetsOKdo/ld19.git
Cloning into 'ld19'...
remote: Enumerating objects: 203, done.
remote: Counting objects: 100% (203/203), done.
remote: Compressing objects: 100% (136/136), done.
remote: Total 203 (delta 102), reused 143 (delta 50), pack-reused 0
Receiving objects: 100% (203/203), 3.21 MiB | 5.41 MiB/s, done.
Resolving deltas: 100% (102/102), done.
+ echo 'Copy driver source'
Copy driver source
+ cp -r ld19/SBC_ROS_SDK/src ld06
+ echo 'Copy rviz source'
Copy rviz source
+ cp -r ld19/SBC_ROS_SDK/rviz ld06
+ cd ld06
+ catkin_make
./lidar_driver_setup.sh: 行 29: catkin_make: コマンドが見つかりません対処法は以下の手順となります。
ROS環境のソース化
新しいターミナルセッションで、ROSの環境設定ファイルをソース化します。
source /opt/ros/melodic/setup.bashビルドディレクトリの権限変更
現在のユーザーがビルドディレクトリに対するフルアクセス権を持っていることを確認します。以下のコマンドを実行してください。
sudo chown -R pi:pi /home/pi/work/ros1/ld06
ビルドの再実行
権限を変更した後、再度 catkin_make コマンドを実行してみてください。
catkin_make
ld06ドライバを起動
ld06ドライバを実行するため、以下のコマンドを実行します。
cd ~/ld06
source devel/setup.bash
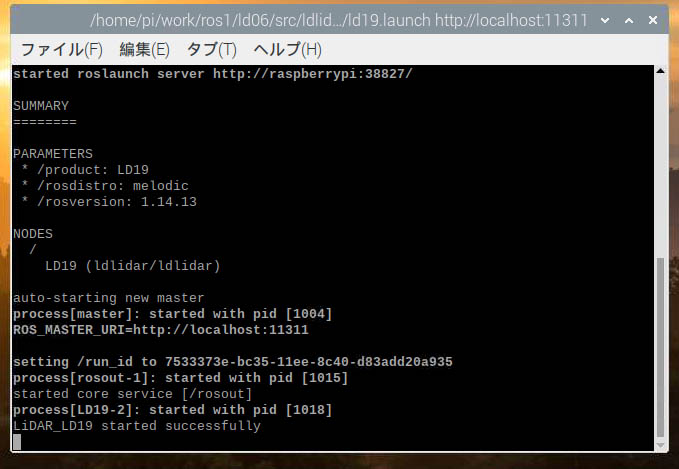
roslaunch ldlidar ld06.launch以下のように画面が表示されたらドライバの起動成功です。
まとめ
Okdo LiDAR Module with Bracket開発キットのld06 LiDARを使用するために必要なドライバのセットアップ方法について解説しました。
ld06 LiDARについては国内の解説サイトがほとんどないため、同じような問題に悩まされている方の参考になれば幸いです。
それでは、また次の記事でお会いしましょう。









コメント