
今回はJetson NanoでROSをセットアップする手順について解説します。
また、当ブログのJetson Nanoに関する記事を以下のページでまとめていますので、あわせてご覧ください。

環境
ハードウェア:Jetson Nano A02 4GB
JETPACK SDK:4.6.2
Python:3.6.9
Jetson Nanoの本体については、私が使用しているモデルは旧モデルのA02ですが、これから購入される方はインタフェースなどが増えているB01モデルがおすすめです。


ROS(Robot Operating System)とは
ROS(Robot Operating System)とは、ロボット用のソフトウェアプラットフォームです。
既存のOS上で動くミドルウェアやソフトウェアフレームワークの一種であり、「メタオペレーティングシステム」 (meta-operating system) とも言われます。
スタンフォード大学の学生が開発した「Switchyard」ベースとなり、それを引き継いだアメリカのウィローガレージ社が2007年に本格開発を開始し、2010年に最初のリリース版が公開されました。
その後、非営利団体「オープンソースロボット財団」(現「オープンロボティクス」)が設立され、ROSの開発を主導する役割が引き継がれました。
ROSが動作するOSはUbuntuやLinux MintなどのLinuxが中心で、macOS、Windows、Androidでも一部の機能が対応しています。
ハードウェアの抽象化、低レベルのデバイス制御、汎用的な機能の実装、プロセス間のメッセージ通信、パッケージ管理などを行うほか、ソフトウェアの開発や実行などのためのツールやライブラリを提供します。
出典:wikipedia

ROSのインストール
ここからは実際のインストール手順を解説します。
今回は以下のサイトを参考にさせて頂きました。

apt認証キーの変更
aptの認証キーを変更します。以下のコマンドを実行してください。
sudo apt-key del 421C365BD9FF1F717815A3895523BAEEB01FA116
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654ROSのインストール
Jetson Nano toolsのリポジトリをダウンロードし、シェルスクリプトを実行します。(既にJetson Nano toolsをダウンロード済みの方は、ディレクトリに移動してシェルスクリプトの実行のみを行ってください)
git clone https://github.com/karaage0703/jetson-nano-tools
$ cd jetson-nano-tools
$ ./install-ros-melodic.sh以上でインストールは完了です。

動作確認
ここからは実際にROSを動作させてみます。
以下のコマンドを実行してください。
roscore以下のようにROSのバージョンが表示されていれば動作しています。
... logging to /home/xxx/.ros/log/11281de4-6719-11ed-9f98-cce1d53f43f1/roslaunch-xxx-desktop-7711.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://xxxxxx:41699/
ros_comm version 1.14.13続いてデモを動かしてみます。
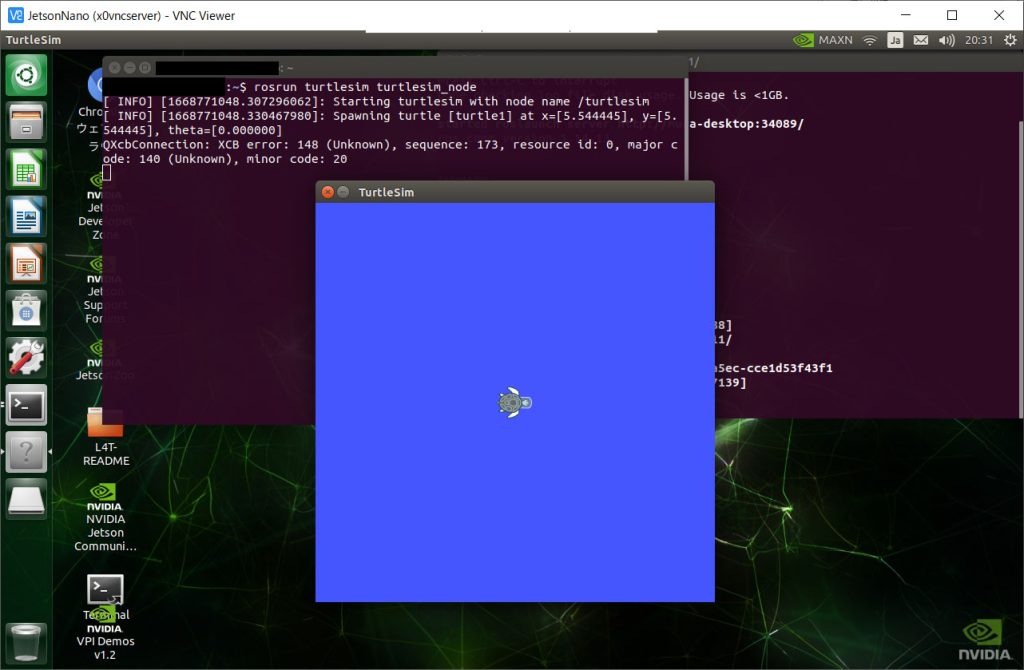
先ほどのプロンプトはroscoreを動作させたままにしておき、別のターミナルを起動して以下のコマンドを実行してください。
rosrun turtlesim turtlesim_node亀の画像が表示され、デモが問題なく動作していることが確認できました。

まとめ
今回はROSのインストール方法について解説してみました。IntelのRealSenseをROSで動作させる方法をまた別の記事で解説する予定です。ロボットの制御などにぜひ活用してみてください。
また、以下の記事で効率的にPythonのプログラミングスキルを学べるプログラミングスクールの選び方について解説しています。最近ではほとんどのスクールがオンラインで授業を受けられるようになり、仕事をしながらでも自宅で自分のペースで学習できるようになりました。
スキルアップや副業にぜひ活用してみてください。

スクールではなく、自分でPythonを習得したい方には、いつでもどこでも学べる動画学習プラットフォームのUdemyがおすすめです。
講座単位で購入できるため、スクールに比べ非常に安価(セール時1200円程度~)に学ぶことができます。私も受講しているおすすめの講座を以下の記事でまとめていますので、ぜひ参考にしてみてください。

それでは、また次の記事でお会いしましょう。




コメント