今回は現在製作中のRaspberry Piベースのスパイダーロボット、PiCrawlerの途中経過をご報告したいと思います。
目次
購入したキット
このブログでも何度も紹介していますが、SunFounderのスパイダーロボット、PiCrawlerです。Raspberry Piをコントローラとして動作し、ユーザーがプログラミングすることができます。
あわせて読みたい
【Raspbery Pi】SunFounderのラズパイロボットPiCrawlerを購入してみた
今回はSunFounder社から発売されている「クモ」を模倣したロボット、PiCrawlerを紹介します。 PiCrawlerは、制御にマイコンボードRaspberry Piを使用でき、動作をPython…
あわせて読みたい
IoTマスターへの近道!UdemyのRaspberry Pi講座でスキルを磨く
Raspberry PiはIoTアプリケーション開発の分野で不可欠なツールです。これは、Raspberry Piがコンパクトでコスト効率が良く、多様なプロジェクトに適用できるためです。…
製作過程
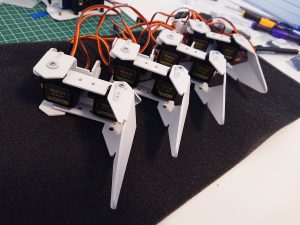
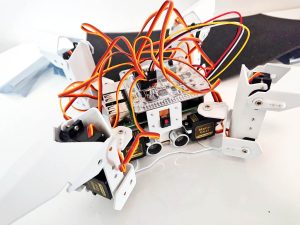
過去2回、製作過程を記事にしました。現在はハードウェア組み立てが終わったところまで公開しています。
あわせて読みたい
【Raspberry Pi】【ロボット】ラズパイベースのスパイダーロボットPiCrawlerを作ってみた Part1
こんにちは、むらさんです。今回からRaspberry Piベースのスパイダーロボット、PiCrawlerの製作について書いていきたいと思います。今回は第1回目ということでロボット…
あわせて読みたい
【Raspberry Pi】【ロボット】ラズパイベースのスパイダーロボットPiCrawlerを作ってみた Part2
こんにちは、むらんです。今回もRaspberry Piベースのスパイダーロボット、PiCrawlerの製作について書きたいと思います。 前回までの経過 前回はロボットの脚部のパーツ…
現在の進捗状況
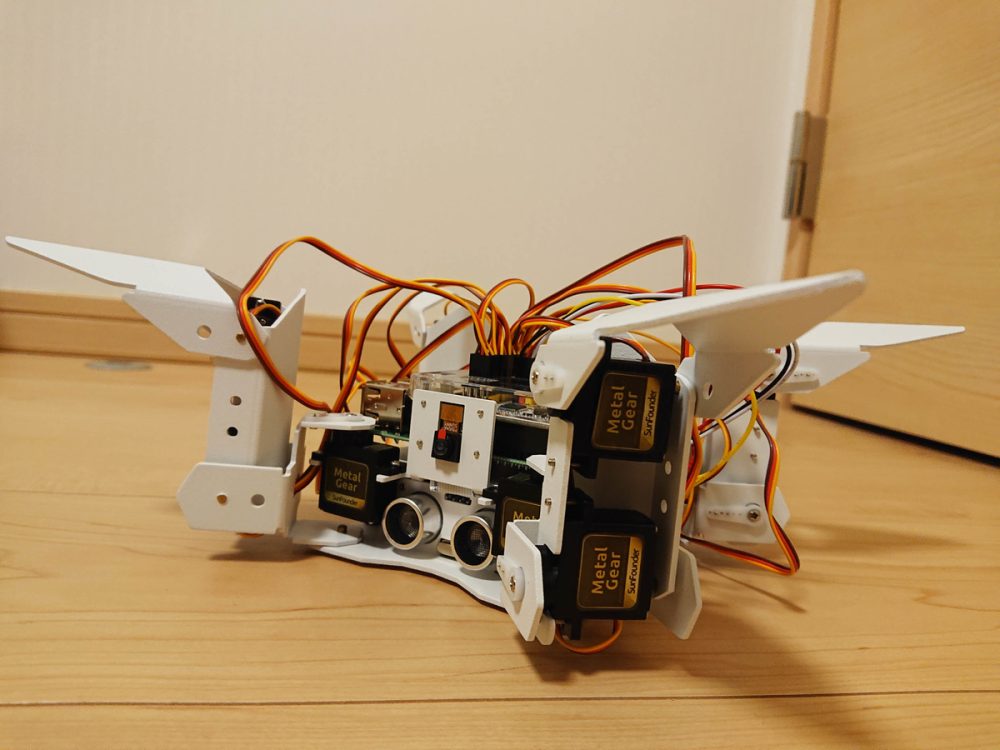
現在はメーカーのサイトからダウンロードできる専用OSと制御アプリケーションをインストールし、実際にロボットが動作するところまで確認できました。
 動作中のスパイダーロボット
動作中のスパイダーロボット
GUIも公開されておりGoogle Playからスマホにダウンロードすることで、スマホをコントローラーとして制御することができます。実際に動作させているところを動画にしてみました。
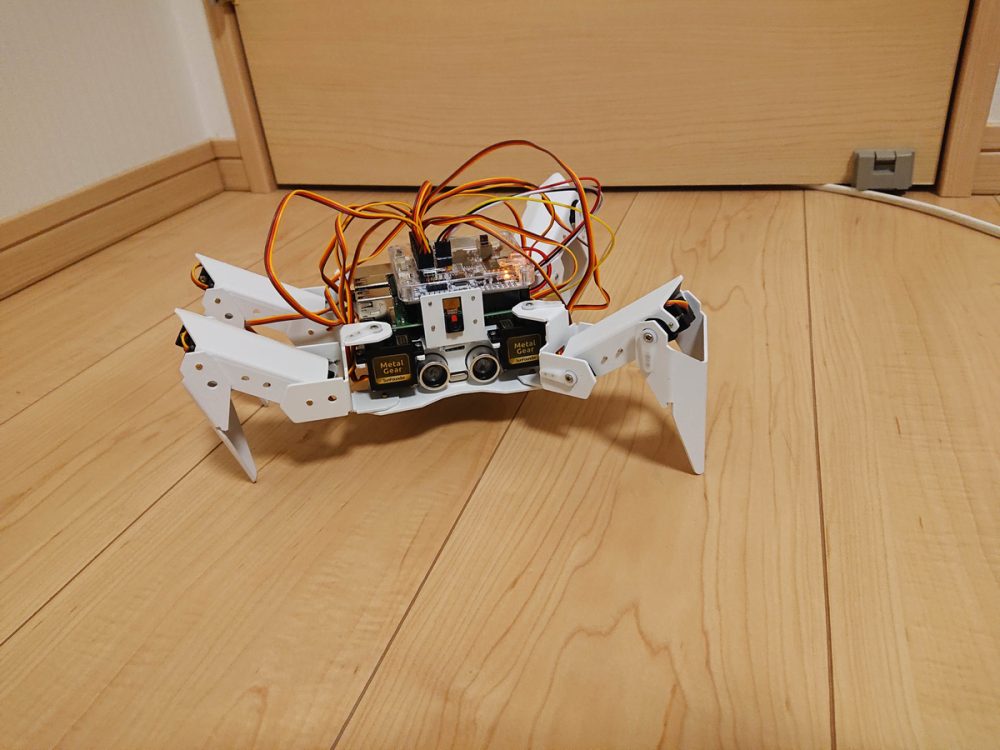
メーカーが公開しているサンプルプログラムを使うと、カニのようにスムーズな動きで動作させることができました。
まとめ
サンプルプログラムを実装することで、ハードウェアが正しく構築できていることが確認できました。メーカーが公開しているOS、サンプルソフトウェアのインストールと、オリジナルの制御プログラムについては今後記事にしていきたいと思います。
また、以下の記事で効率的にPythonのプログラミングスキルを学べるプログラミングスクールの選び方について解説しています。最近ではほとんどのスクールがオンラインで授業を受けられるようになり、仕事をしながらでも自宅で自分のペースで学習できるようになりました。
スキルアップや副業にぜひ活用してみてください。
あわせて読みたい
Pythonが学べるプログラミングスクール5選 | 初心者にもおすすめ
プログラミングスクールってたくさんあって、どのスクールを選んだらいいのかな? 自分のキャリアアップに必要なカリキュラムがあるプログラミングスクールを探したいん…
スクールではなく、自分でPythonを習得したい方には、いつでもどこでも学べる動画学習プラットフォームのUdemyがおすすめです。
講座単位で購入できるため、スクールに比べ非常に安価(セール時1200円程度~)に学ぶことができます。私も受講しているおすすめの講座を以下の記事でまとめていますので、ぜひ参考にしてみてください。
あわせて読みたい
Python初心者におすすめ! いつでもどこでもスマホで学べるUdemy講座6選
Udemyってどんなサービスなの? 仕事の案件で機械学習を扱うことになったけど、どうやって勉強したらしいんだろう? こんな悩みを解決します。 この記事でわかること Ud…
それでは、また次の記事でお会いしましょう。













コメント