こんにちは、むらんです。
今回もRaspberry Piベースのスパイダーロボット、PiCrawlerの製作について書きたいと思います。
前回までの経過
前回はロボットの脚部のパーツを組み立てたところまでで終わりました。詳細は以下の記事をご覧ください。
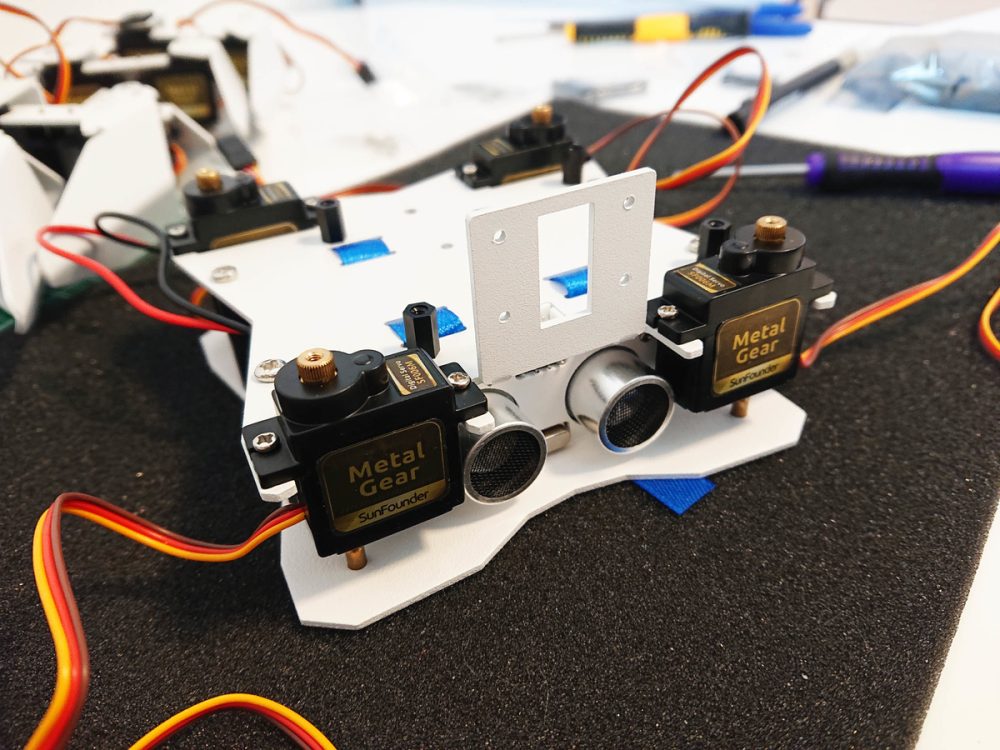
本体側サーボモーター取付
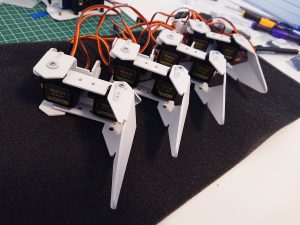
脚が完成したので次は本体側の第一関節部分のサーボモーターを取り付けていきます。こちらもサーボモーターを0度の位置に調整してから取付します。
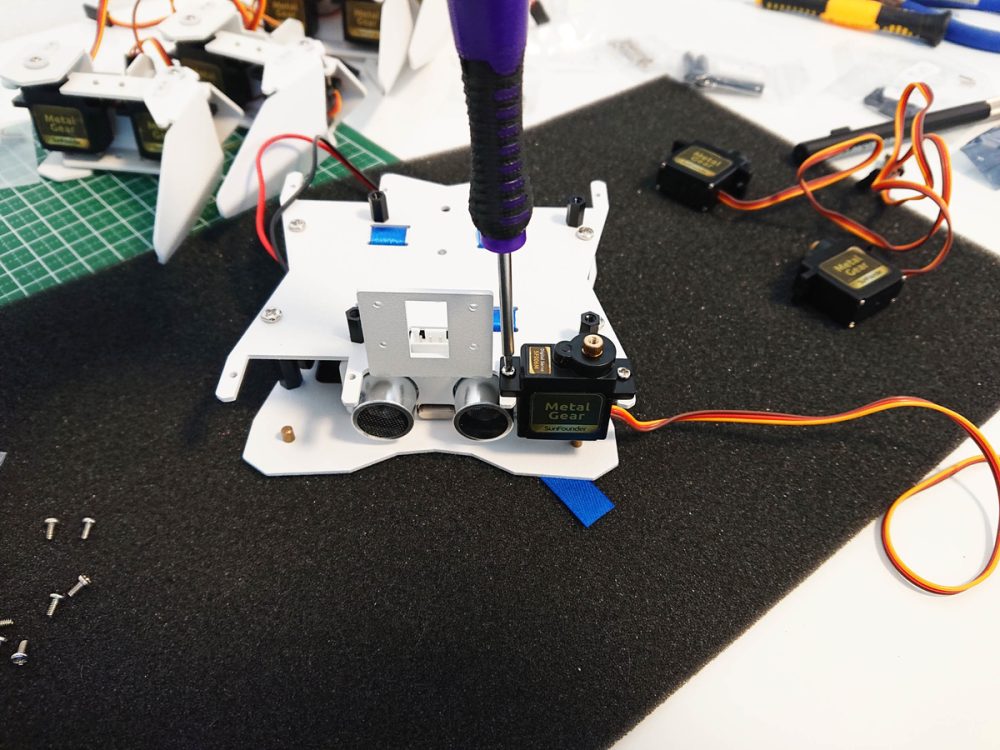
全てのサーボモーターが取り付けられました。
カメラモジュール取付
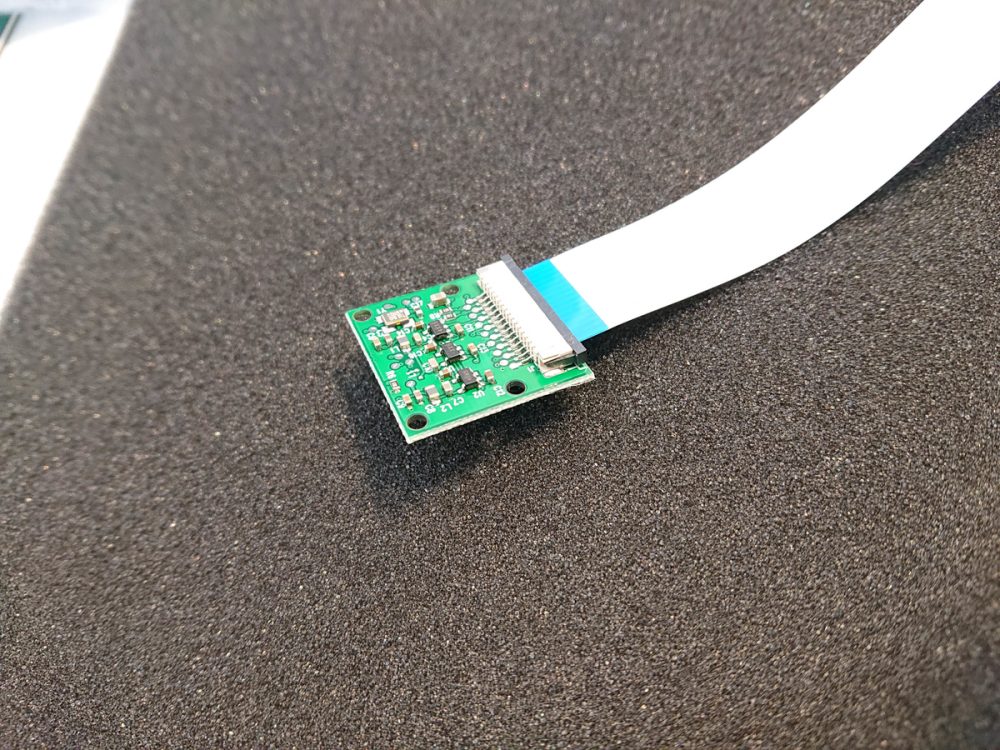
続いてカメラモジュールを取り付けていきます。同梱されていたカメラモジュールはこちら。
基板はSunFounderオリジナルのようです。リボンケーブルも2つ付いていました
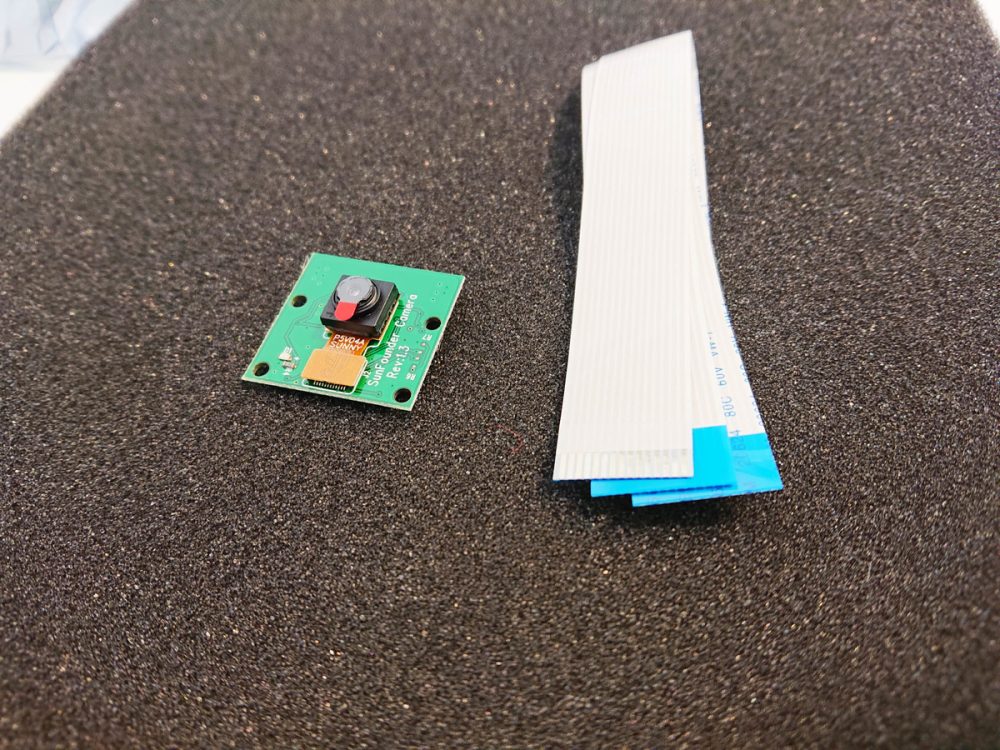
リボンケーブルをカメラモジュール側のコネクタに挟み込みます。
反対側はラズパイをフレームに固定した後で取り付けます。

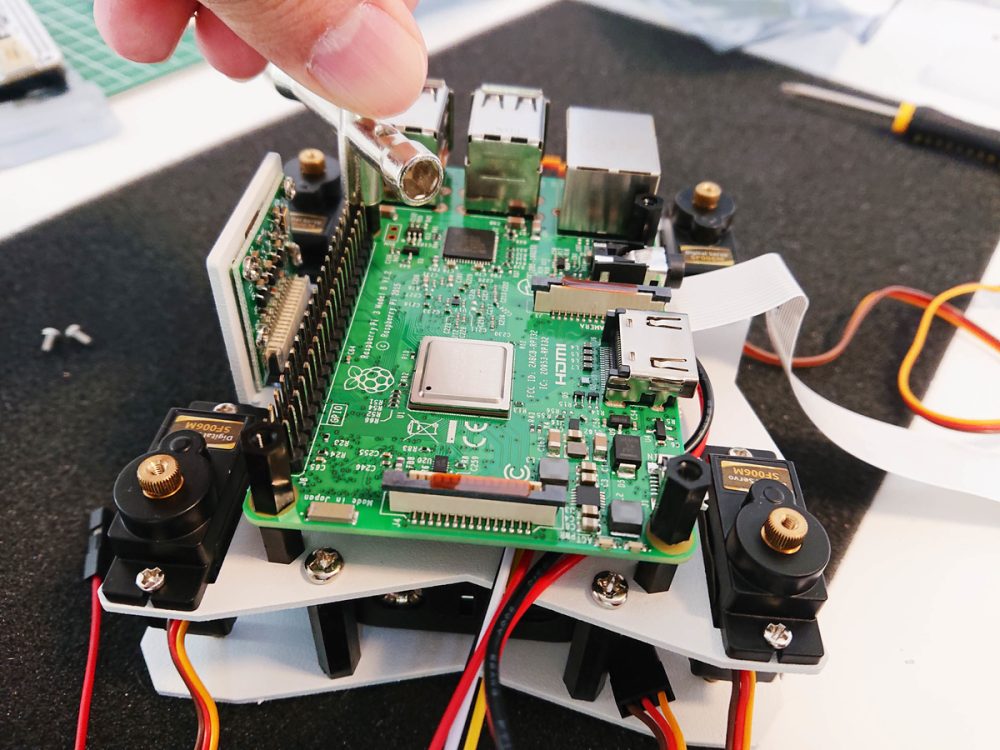
Raspberry Piの取付
続いてラズパイ本体の取付です。付属の工具を使って、フレームにスペーサーでラズパイを固定します。
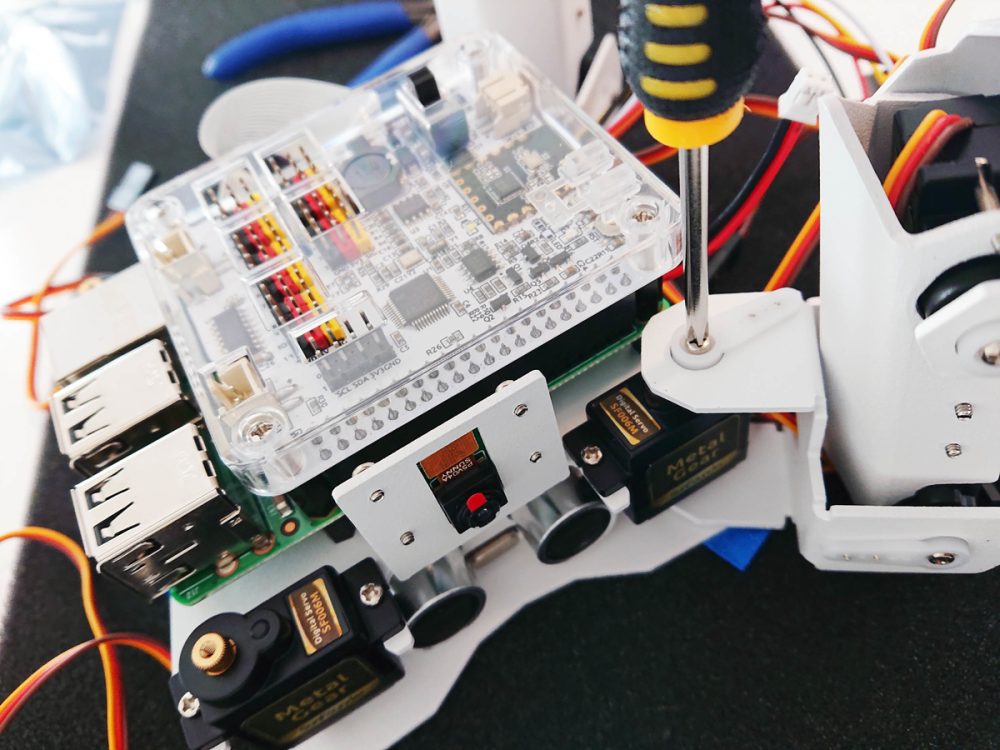
ラズパイが固定出来たら、先ほどのカメラモジュールのリボンケーブルを取り付けます。HDMIの横のあたりにあるコネクタに接続します。

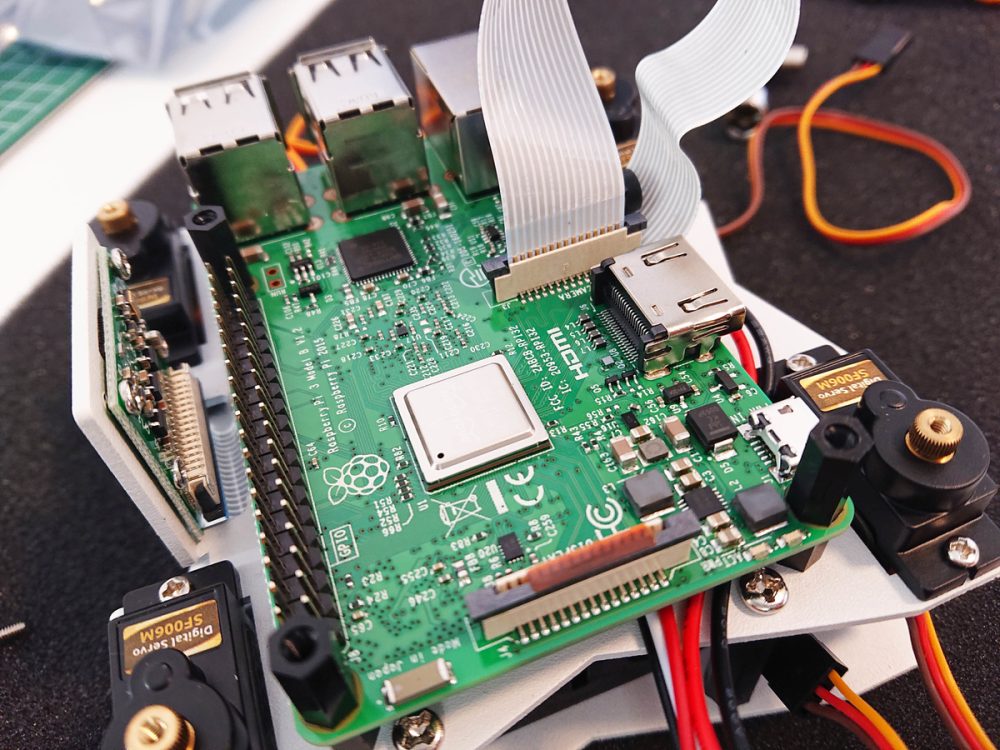
リボンケーブルの長さはあまり余裕がなく取り回しに少し苦労しました。

サーボコントローラー取付
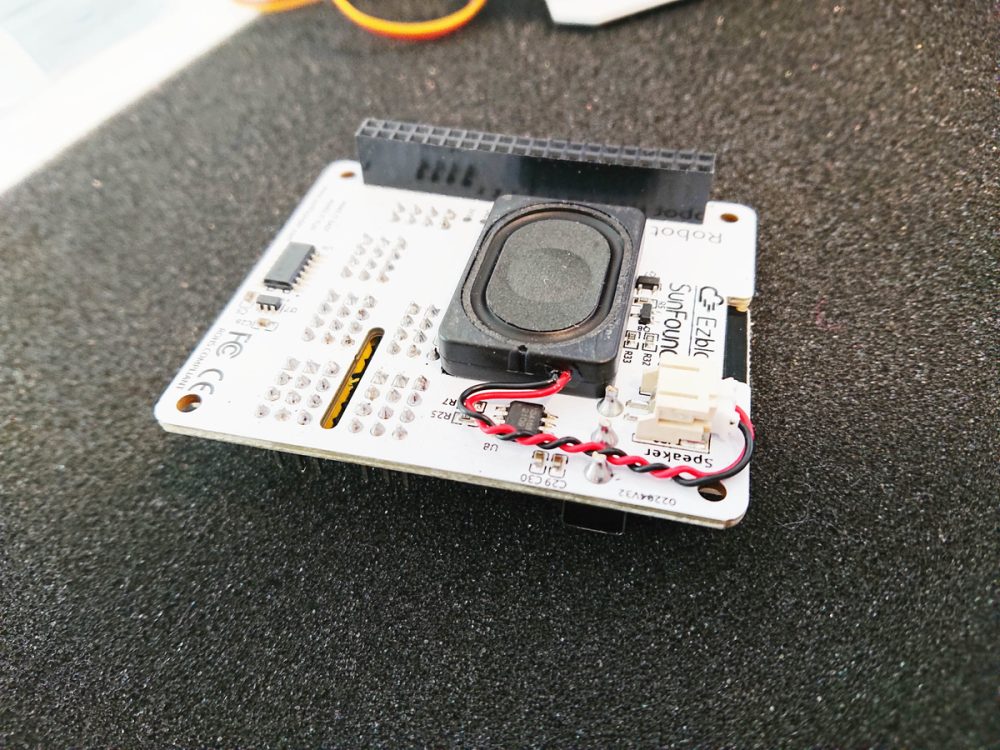
続いてサーボコントローラー取付です。この基板はHATというラズパイの規格で作られていて、SunFounderオリジナルのようです。この基板からラズパイ本体の電源も供給します。
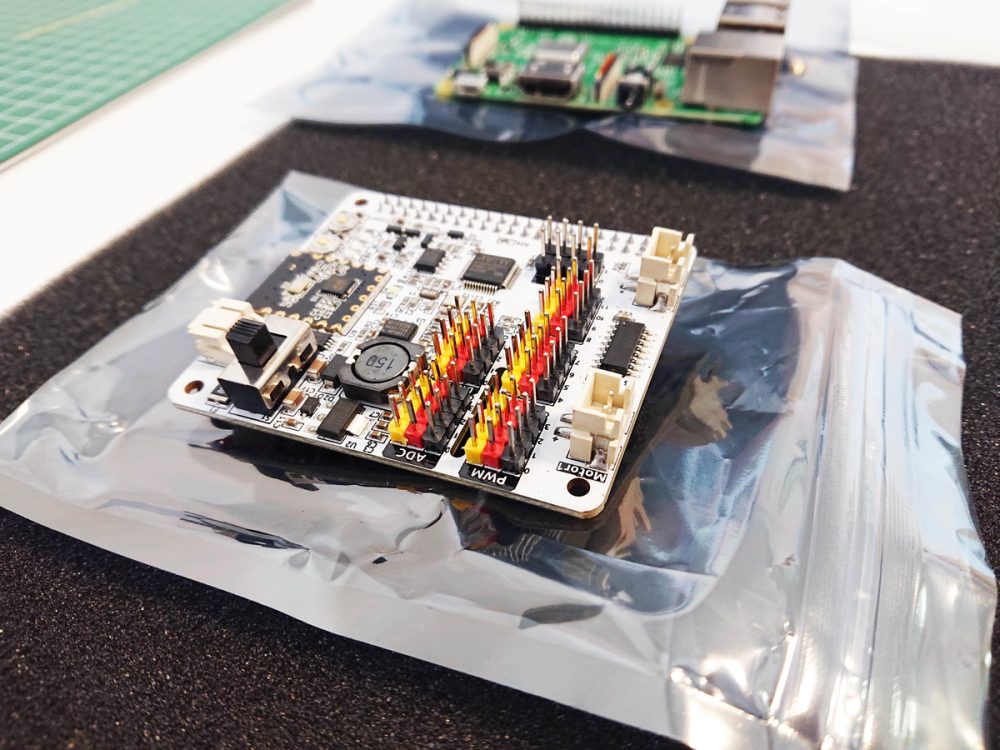
ちなみに裏面にはスピーカーが取り付けられており、音楽を流したり、しゃべらせたりすることができるようです。
HATをラズパイのGPIOにセットします。そしてHATの上から基板の保護カバーを付けた上で、ビスで止めていきます。
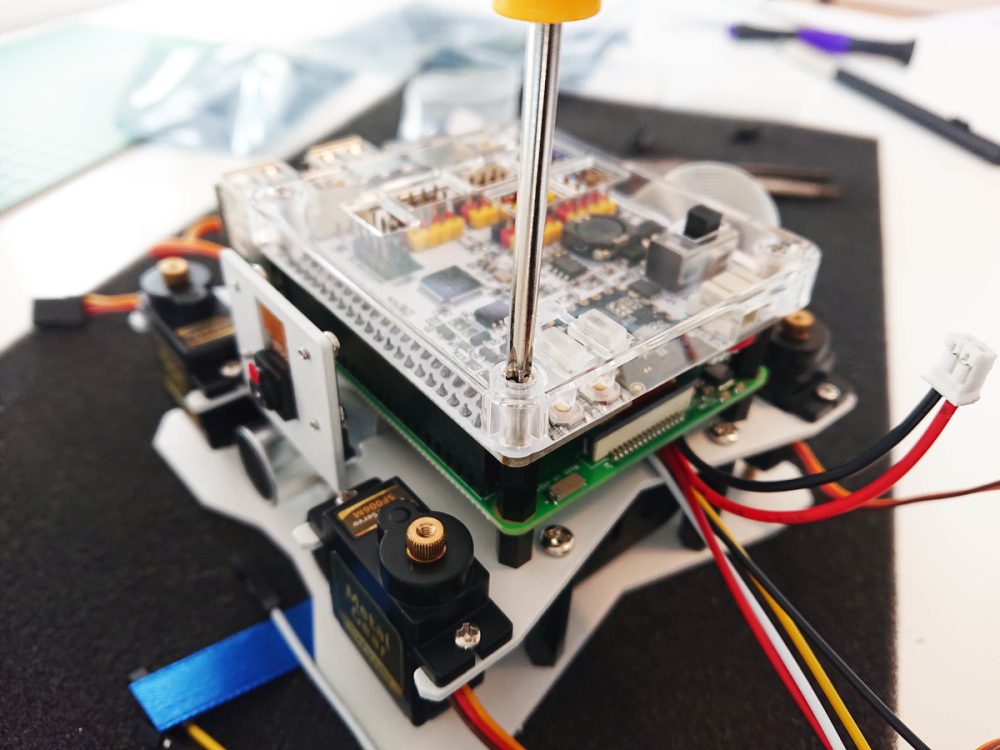
ここでカバーを取り付けずにHATをビスで固定すると、スペーサーが壊れてしまいますので注意してください。
脚パーツの取付
最後に本体に、前回のブログで作成した4本の脚部のパーツを取り付けていきます。脚の取付もマニュアルに初期位置の角度が指定されていますので、それに合わせて取り付けてください。
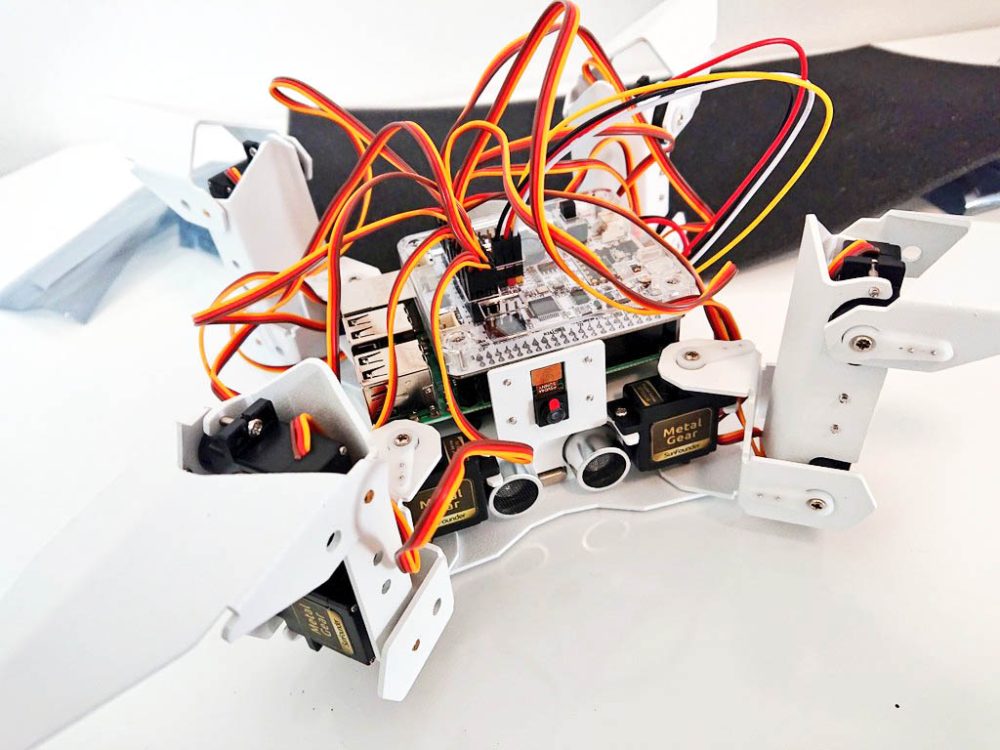
これで組み立てはほぼ終了です。
モーター、センサー類の配線
最後にサーボモーターやセンサー類の配線をしていきます。
ピンアサインについては、下記ページからダウンロードできるマニュアルに記載がありますので、それにしたがって配線していきます。
特にハンダ付け等は不要で、コネクタをピンヘッダに差し込んでいくだけです。
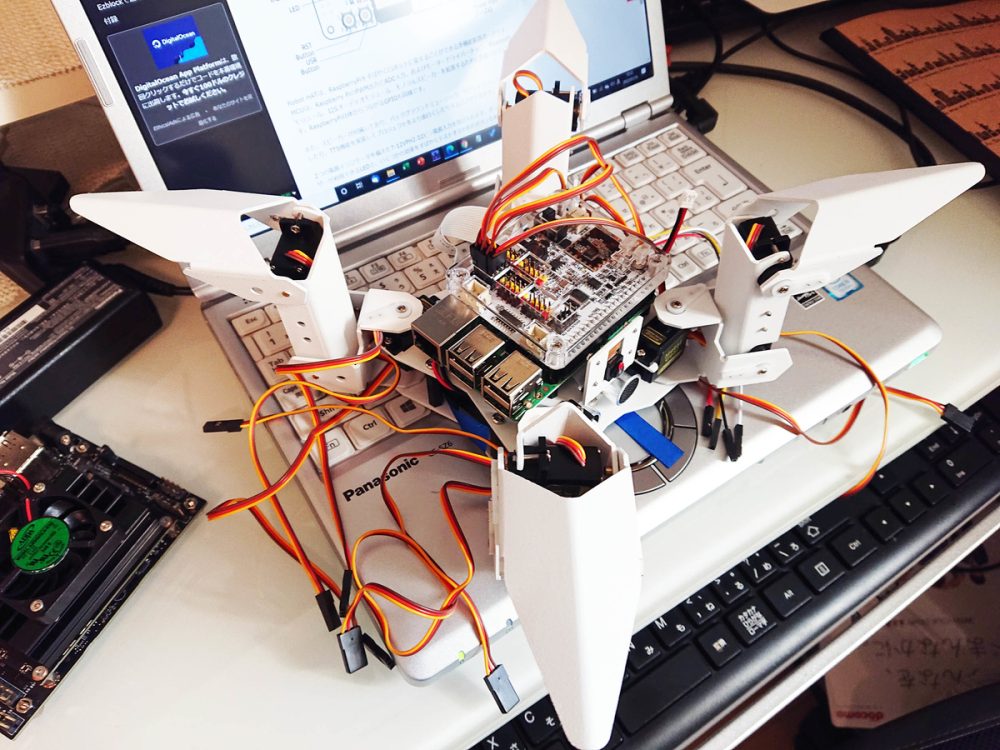
配線の結束バンドも付いていましたが、修正する可能性もありますので動作確認がとれてから配線を整理したいと思います。
これでハードウェアの準備が完了しました。
まとめ
いかがだったでしょうか?
ハードウェアの構築は一通り終わって動かせる状態になりました。次回はOS、ソフトウェアのセットアップについて書いていきたいと思います。
また、以下の記事で効率的にPythonのプログラミングスキルを学べるプログラミングスクールの選び方について解説しています。最近ではほとんどのスクールがオンラインで授業を受けられるようになり、仕事をしながらでも自宅で自分のペースで学習できるようになりました。
スキルアップや副業にぜひ活用してみてください。

スクールではなく、自分でPythonを習得したい方には、いつでもどこでも学べる動画学習プラットフォームのUdemyがおすすめです。
講座単位で購入できるため、スクールに比べ非常に安価(セール時1200円程度~)に学ぶことができます。私も受講しているおすすめの講座を以下の記事でまとめていますので、ぜひ参考にしてみてください。

それでは、また次の記事でお会いしましょう。
おすすめ記事











コメント