こんにちは、むらさんです。
今回からRaspberry Piベースのスパイダーロボット、PiCrawlerの製作について書いていきたいと思います。今回は第1回目ということでロボットのハードウェアの組み立てについてです。アマゾン等でSunFounderのロボットを見て気になっている方は是非、参考にしてもらえると嬉しいです。
SunFounderのロボット
まずは今回購入したSunFounderのロボット「PICRAWLER FOR RASPBERRY PI」についてです。組み立てたロボットにコントローラとしてRaspberry Pi 3、4を取り付けることで動作します。またロボットの動作をPythonでユーザーがプログラミングできるようです。
以前、キットの内容をブログで書いています。

また、ロボットのコントローラーとしてラズパイ3も購入しました。

あとはバッテリーが付属していないので、別途用意する必要があります。
それでは、実際に組み立てていきましょう。

バッテリーケースの取り付け
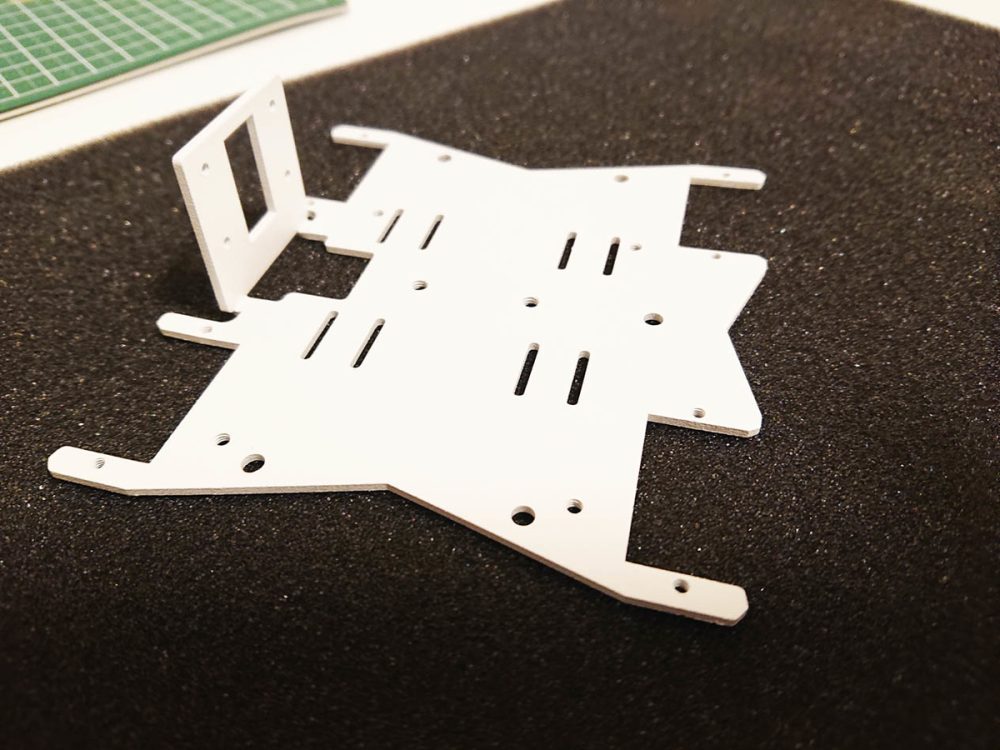
まずはバッテリーケースを取り付けていきます。ロボットのフレームにはあらかじめビスを取り付ける穴などが加工されていますので、ここにビスで固定していくだけです。ご丁寧に工具まで付いていました。
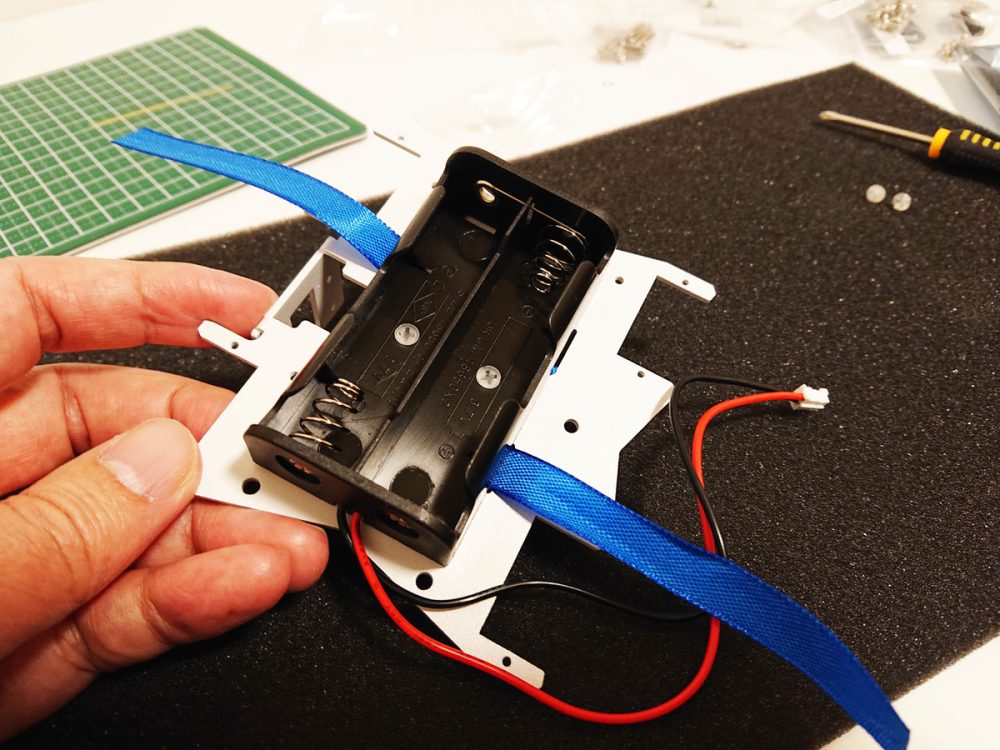
こんな感じでバッテリーケースを取り付けました。青いリボンはバッテリーを取り外す際に引っ張るものです。

距離センサーの取り付け
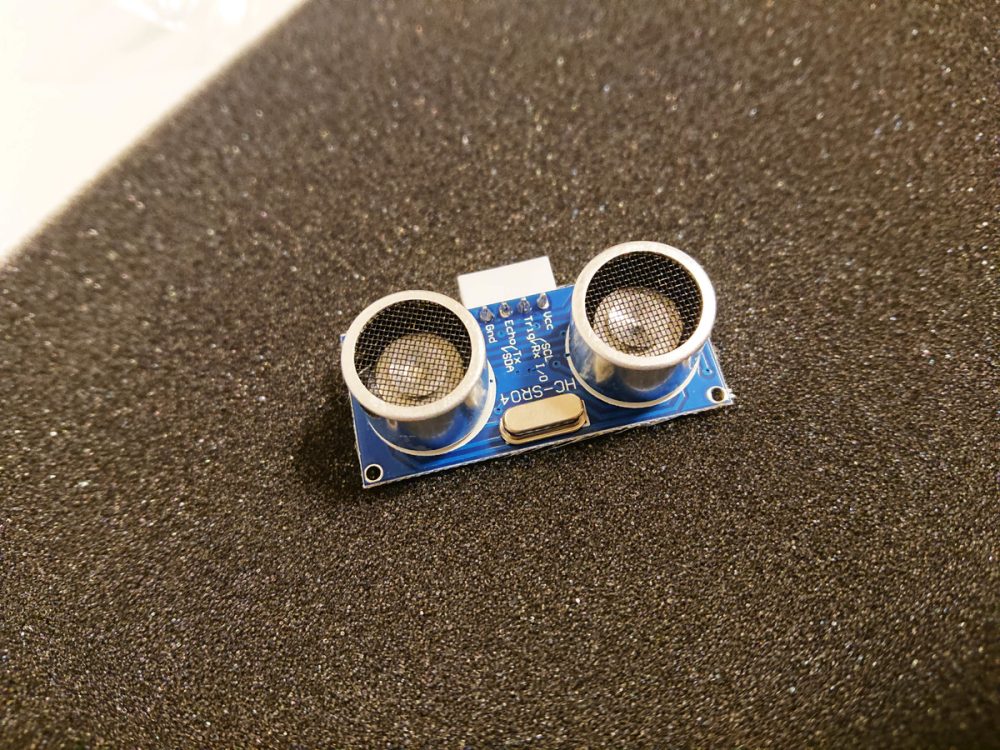
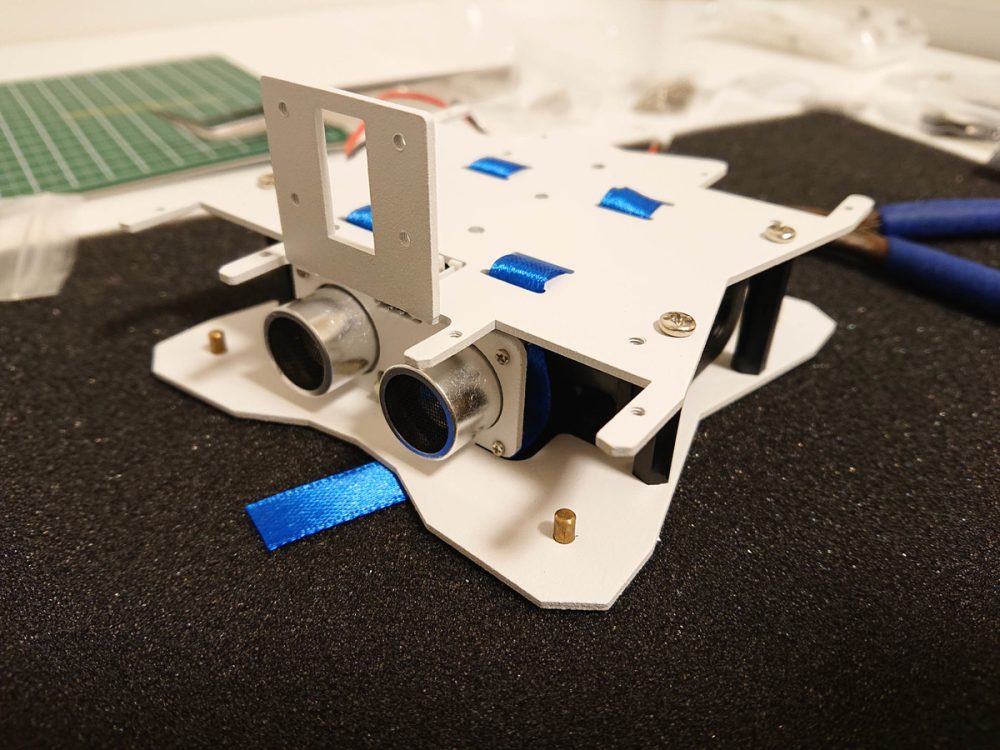
続いて距離センサーです。このセンサーはSunFounderオリジナルではなく、一般的に市販されているHC-SR04で電子工作でもよく使われるもののようです。片方のスピーカーから超音波を出し、物体に当たって帰ってきた超音波をもう一つのスピーカーで受信し、その時間により物体との距離を測ります。ロボットが障害物を回避するために使うようです。
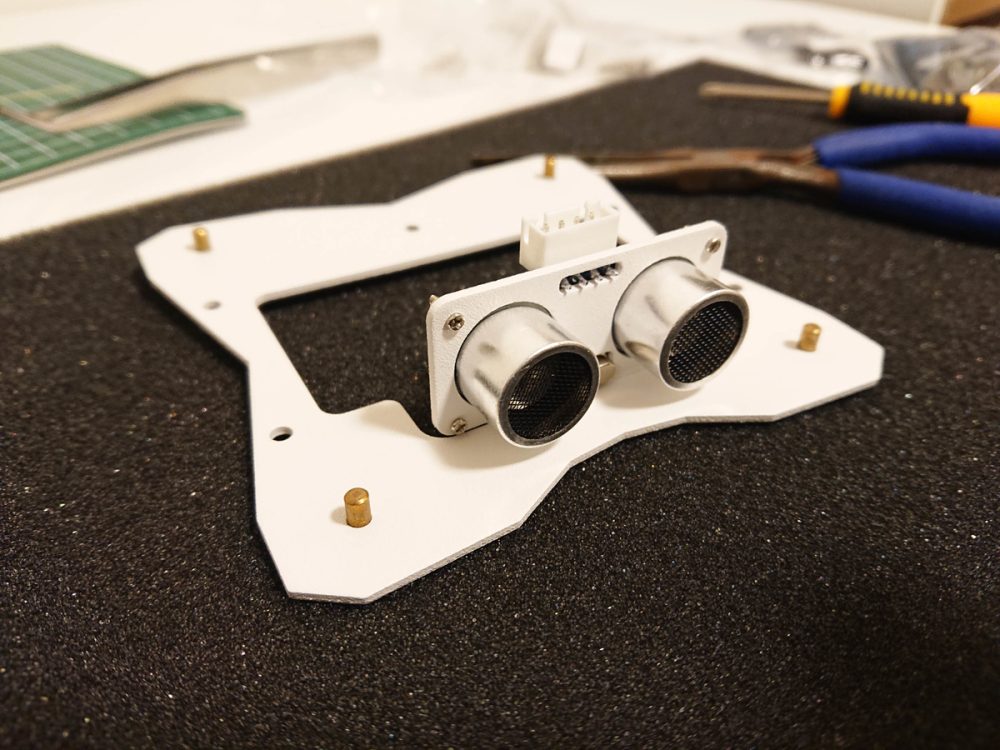
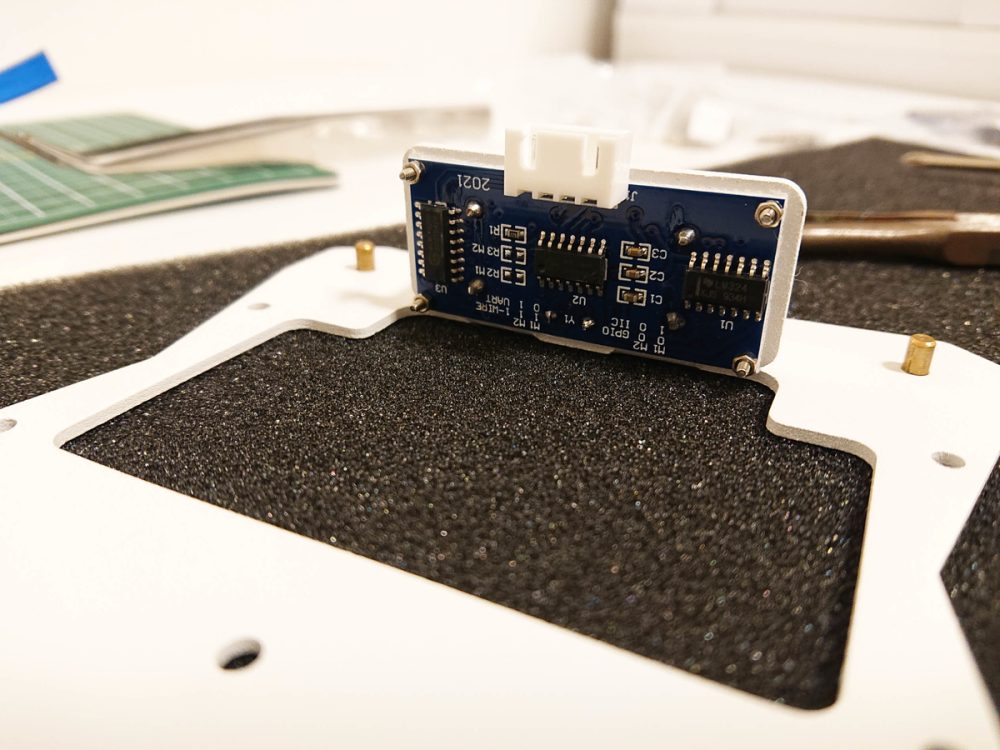
ロボットのフレームに取り付けるとこんな感じになりました。ビス4本で固定します。
裏面はこんな感じです。
スペーサーの取り付け
距離センサーの取り付けが終わったら、スペーサーを取り付けバッテリー側のフレームと組み合わせます。
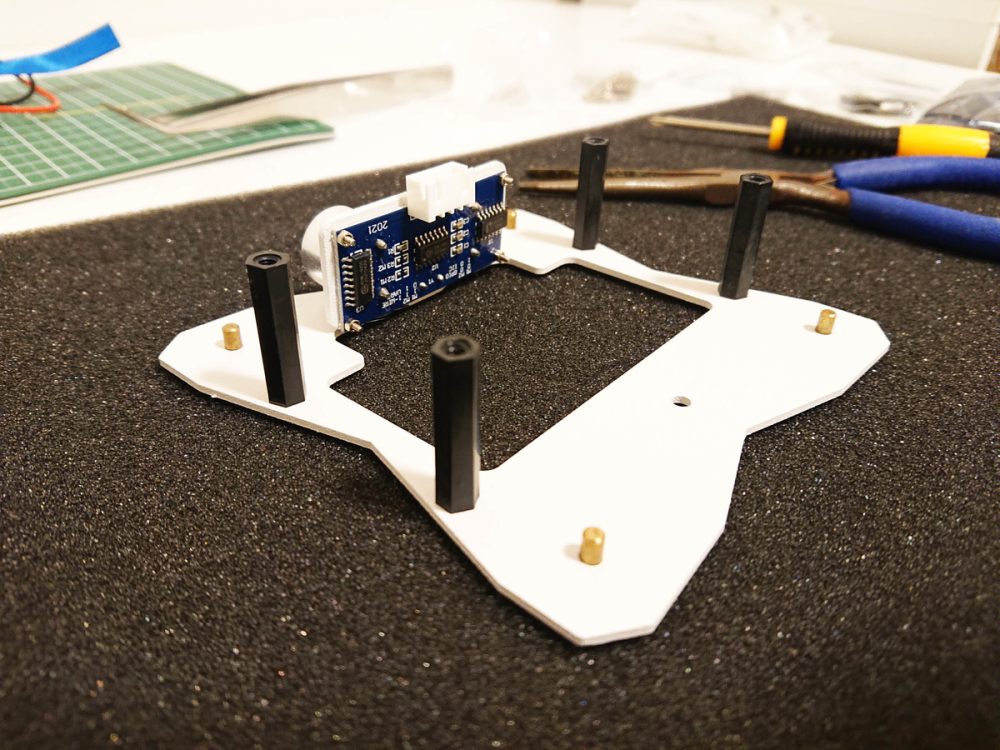
スペーサーを締めるための六角レンチのような工具も付属しています。
こんな感じで本体部分が組みあがってきました。
脚の組み立て
続いて脚の組み立てをしていきます。
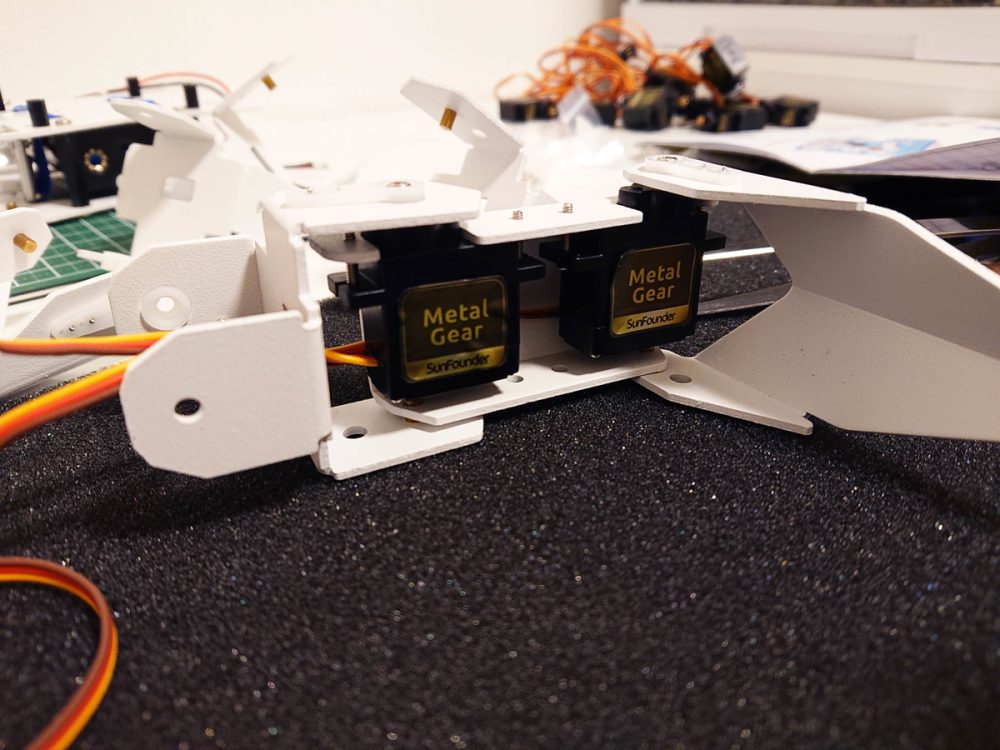
まずロボットのフレームにサーボモーターのマウントを組み付けていきます。一つのマウントにつき2つのビスで固定します。
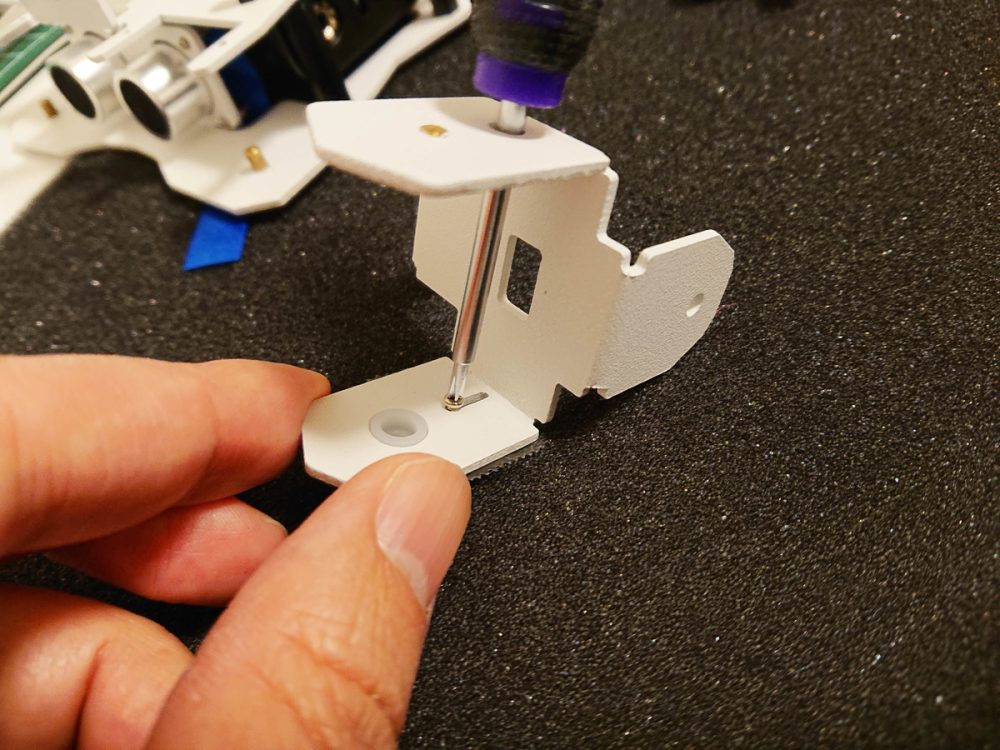
取付後はこんな感じになります。

続いて関節を駆動するためのサーボモーターです。1本の足に3つずつ、計12個あります。
まずサーボモーターを組み付ける前に、サーボの位置を0度に調整する必要があります。手順はこちらのサイトに載っています。
0度の位置にサーボを調整したら、各サーボモーターを3つのビスでフレームに固定していきます。
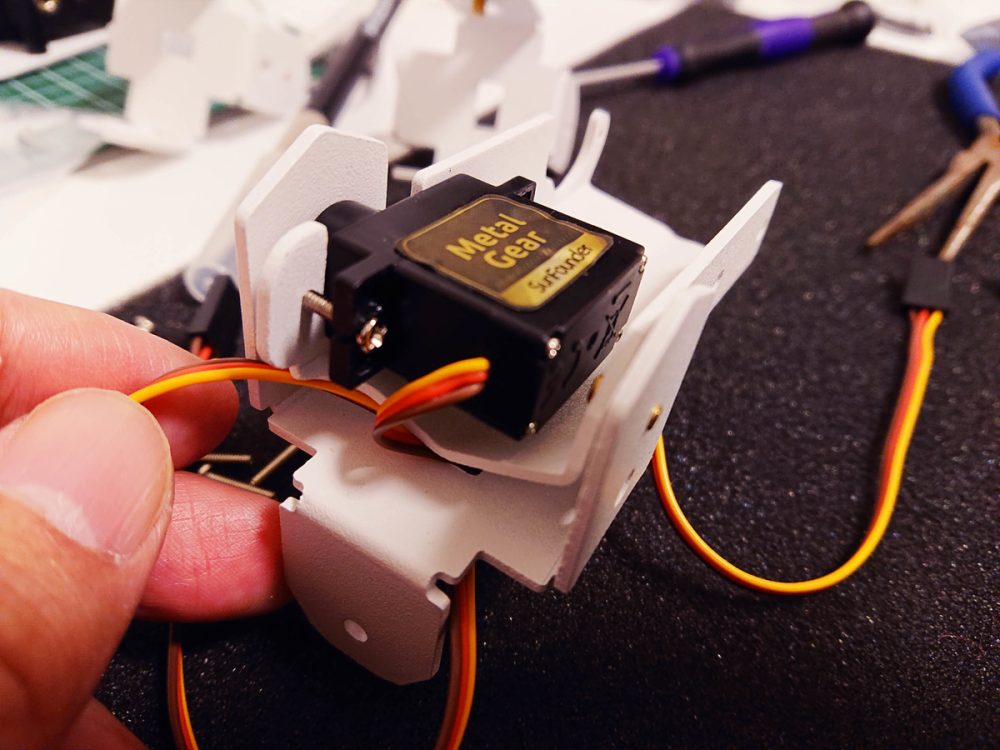
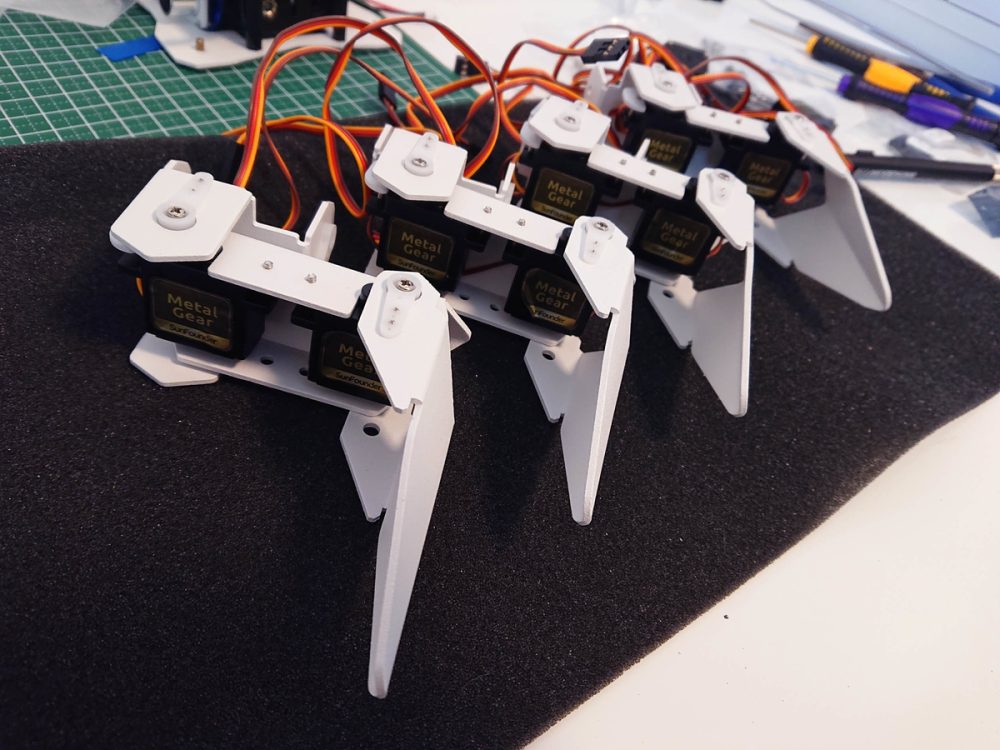
さらに足の先のフレームを組み付け、そこにもサーボモーターを取り付けていきます。
これを計4つ作ると脚部の組み立てが完了です。結構大変な作業でした。
まだまだ工程は続きますので、今回はここまでにしたいと思います。
まとめ
脚のパーツで一部、部品のネジの穴がずれている部分もあり、若干無理やり固定した感のあるところがあります。加工の精度の問題でしょうか…。
それ以外はスムーズに組み立てられました。工具も入れてもらっているのはとても良いなと思いました。
というわけで、次回は胴体の組み立てに入っていきたいと思います。
それでは、また次の記事でお会いしましょう。
おすすめ記事












コメント