ロボット– category –
-

REALSENSE Depth Camera D435をレビュー
今回はIntel社のREALSENSE Depth Camera D435を入手しましたので、レビューしたいと思います。先日Arducam製のカメラを買ったばかりですが、Twitterのフォロワーさんか... -
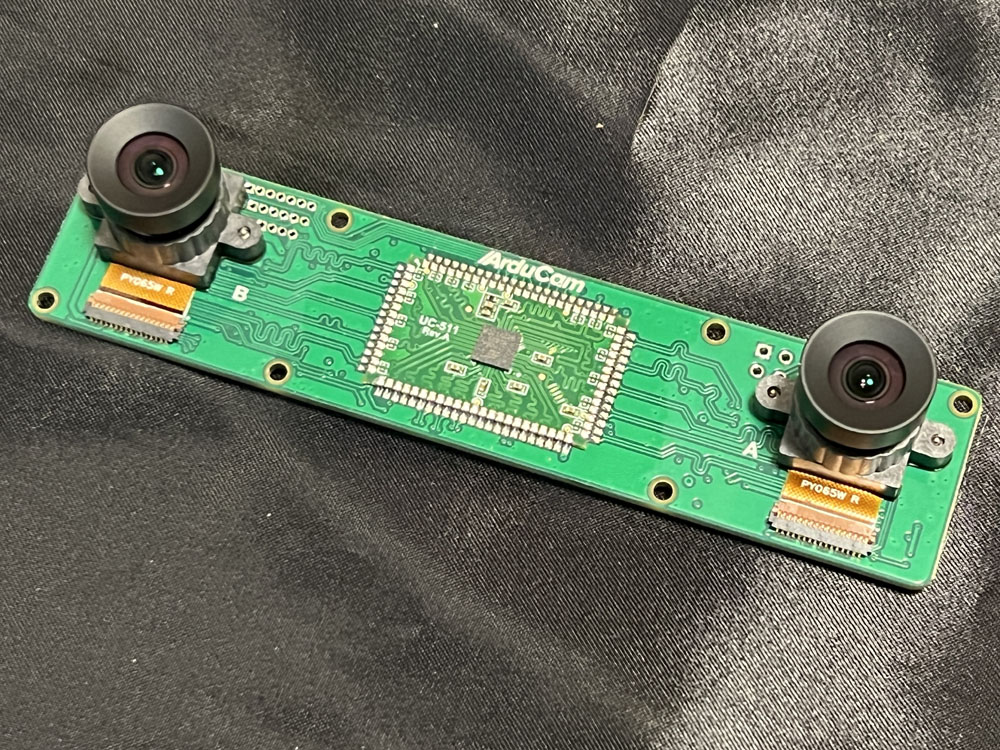
Arducam製のOV9281搭載ステレオカメラを購入しました
今回はJetsonやRaspberry Piで使用できるステレオカメラを購入しましたので、レビューしていきたいと思います。 購入したステレオカメラ 今回購入したのはArducamという... -
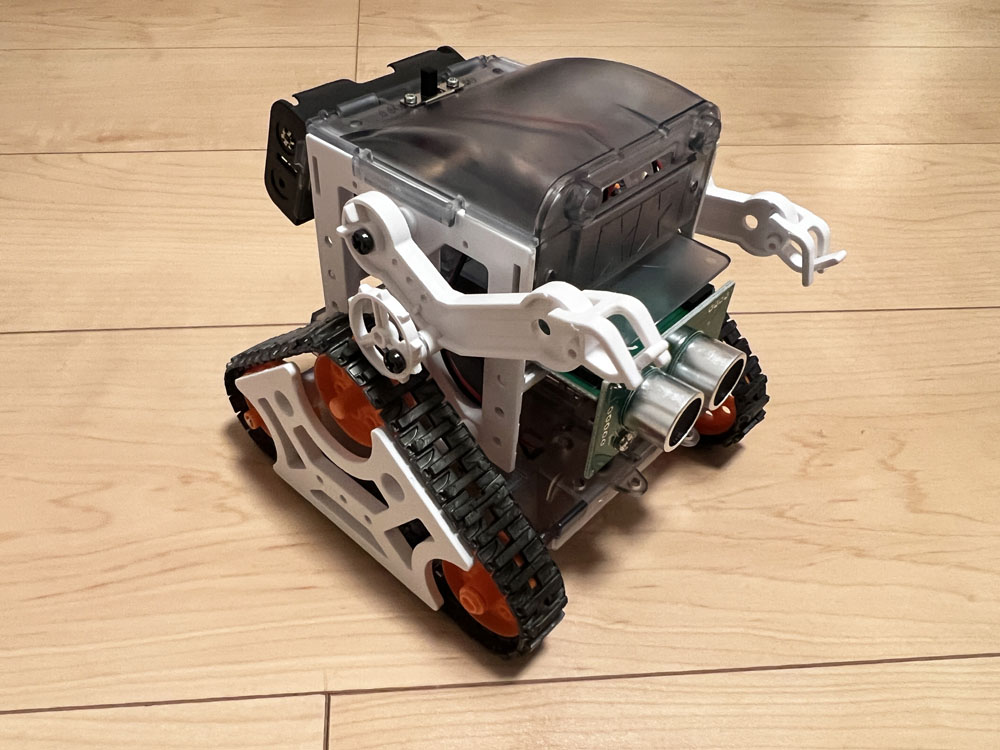
タミヤ プログラミング工作シリーズ クローラータイプのキットを組み立ててみました
今回は先日キット内容をレビューした「プログラミング工作シリーズ No.01 マイコンロボット工作セット クローラータイプ」を組み立ててみましたので、動作テストも含め... -
タミヤ プログラミング工作シリーズ No.01 マイコンロボット工作セット クローラータイプをレビュー
今回は子供のプログラミングの勉強用にタミヤのロボット工作キットを購入してみましたので、レビューしていきたいと思います。 購入したキット 今回購入したキットは模... -
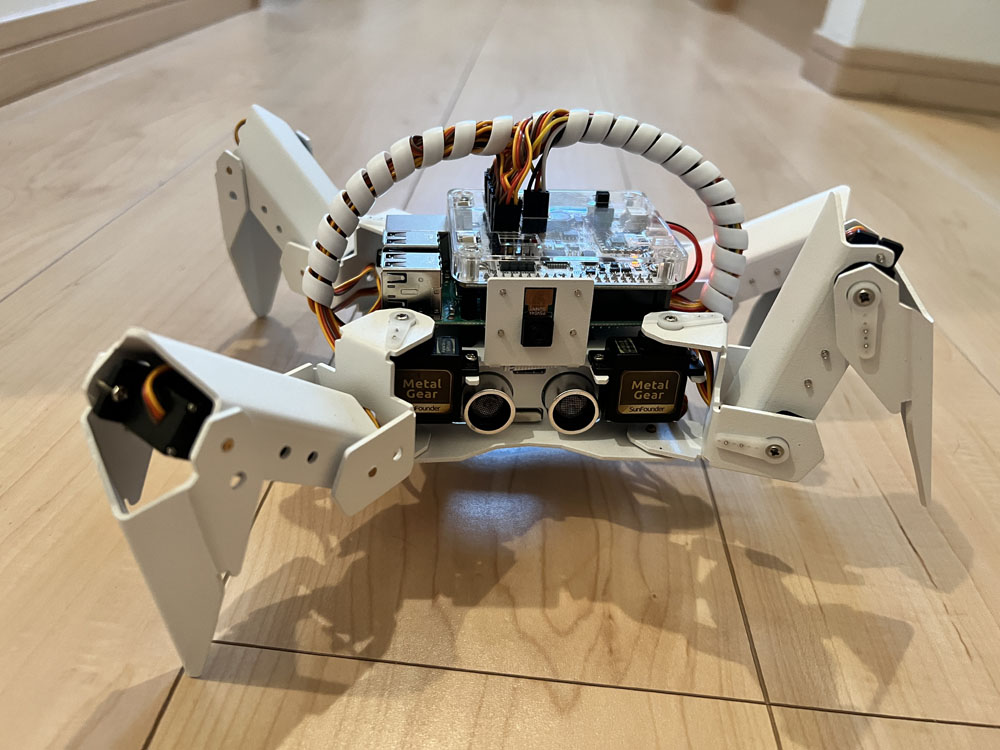
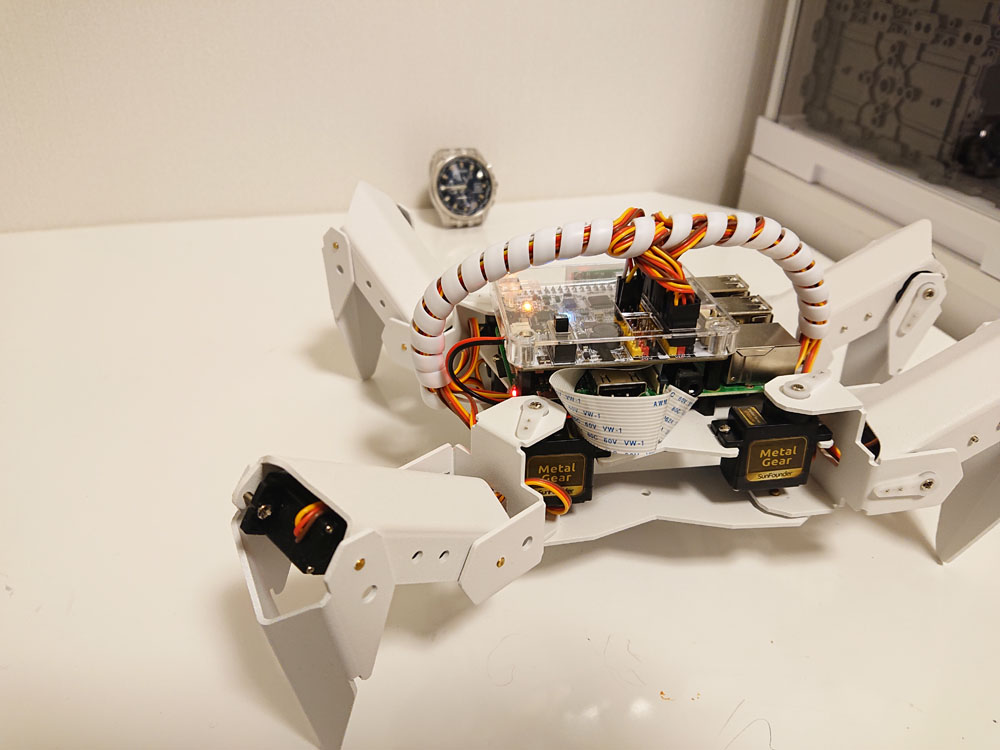
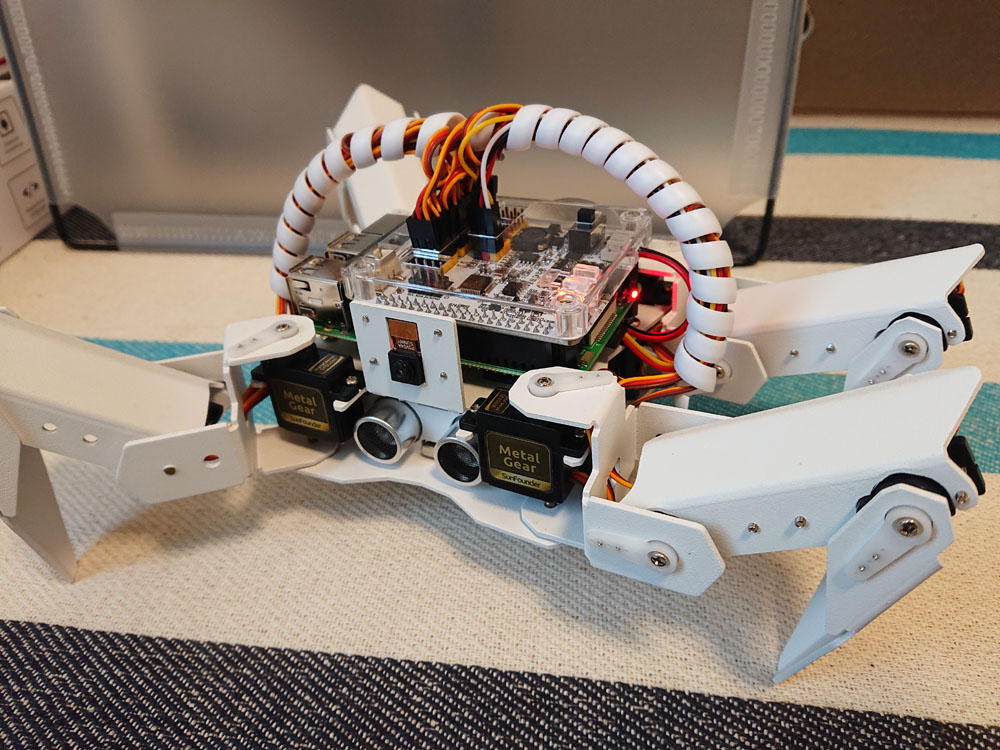
ラズベリーパイでロボットを作ろう! SunFounder PiCrawler
今回はラズベリーパイで手軽に作れるスパイダーロボット、SunFounder PiCrawlerについて解説したいと思います。ソースコードも併せて公開していますので、ラズベリーパ... -
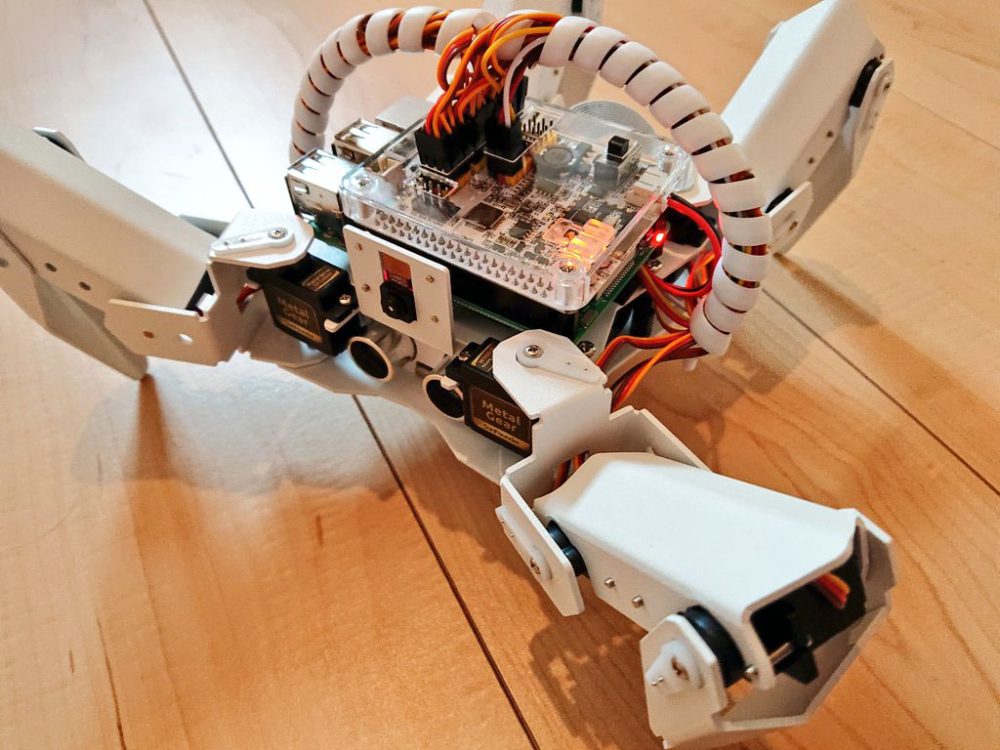
ラズベリーパイ(Raspberry Pi)ロボットをディープラーニングで人間に追従させる
今回はラズベリーパイ(Raspberry Pi)をコントローラとして動作する4足歩行ロボット、PiCrawlerの自律制御機能の一部が実装できたので記事にしたいと思います。 使用する... -
【Raspberry Pi】TensorFlowでターゲット追跡ロボット製作 途中経過
今回は現在製作しているスパイダーロット Picrawlerの途中経過として記事にしたいと思います。 やりたいこと 現在、作成中のプログラムは「ロボットがディープラーニン... -
Raspberry PiベースのロボットPiCrawlerをGUIアプリケーションから操作する
今回は当ブログで作成しているRaspberry PiベースのスパイダーロボットPiCrawlerを、Pythonで記述したGUIプログラムから制御できるようにしたため、記事にまとめたいと... -
Raspberry Piのマルチコア並列処理でロボットを制御する
今回は先日記事にしたRaspberry Piのマルチコア、マルチプロセスによる並列処理で実際にロボットを制御してみたいと思います。言語はPythonになります。 並列処理でやり... -
【Raspberry Pi】爆速!ラズパイでマルチコア並列コンピューティング
Raspberry Pi 3、4のSoCでは、4つのCPUコアを搭載しています。シングルコアのCPUではマルチスレッドで複数の処理を実行したい場合は、処理を複数のスレッドに分けて、順... -
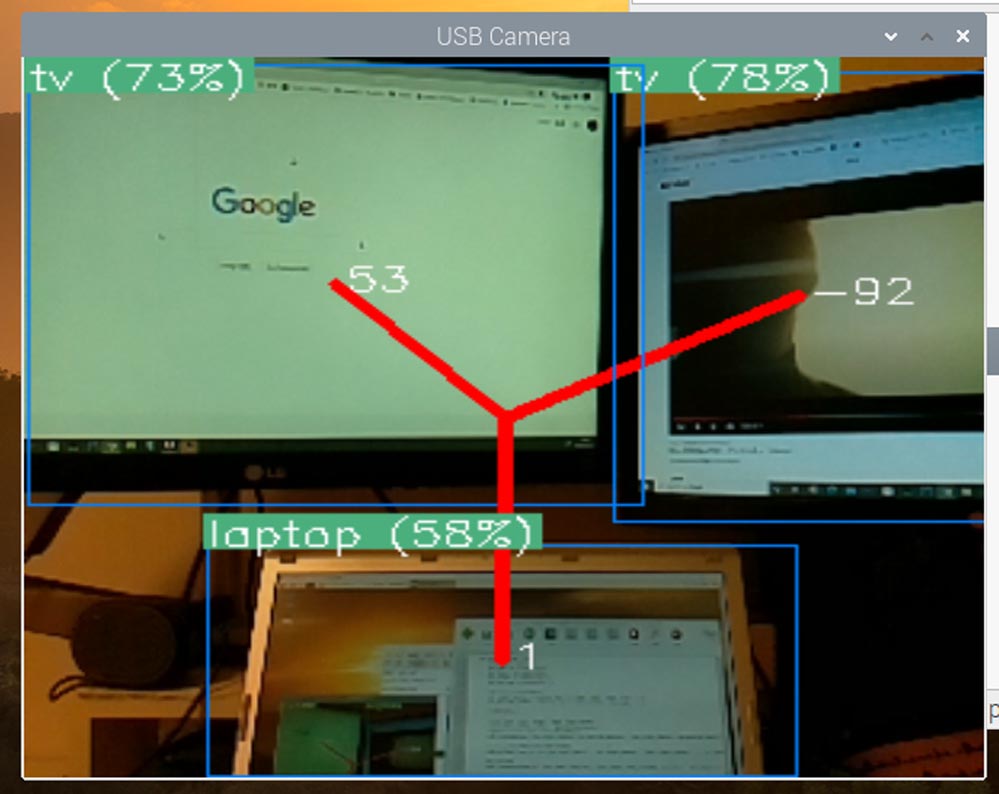
【Raspberry Pi】ディープラーニングで検出したオブジェクトの位置情報を取得する
今回はロボットに搭載するディープラーニングを使った画像処理アプリケーションが完成したので記事にしたいと思います。以前書いたTensorFlow Liteによる物体検出を行う... -
【ロボット】Raspberry Piも動かせるロボット用リチウムイオンバッテリー
今回はロボット用に購入したリチウムイオンバッテリーと充電器について書きたいと思います。電子工作をする際に、特に移動体などで電源ケーブルを接続して使えない場合...