今回はロボットに搭載するディープラーニングを使った画像処理アプリケーションが完成したので記事にしたいと思います。
以前書いたTensorFlow Liteによる物体検出を行うプログラムをさらに改良して、検出したオブジェクトの位置情報を取得できるようにしてみました。
また、OpenCVの活用事例についても以下の記事で解説していますので、あわせてご覧ください。
Raspberry Pi(ラズベリーパイ)とは
Raspberry Pi 5は、Raspberry Pi財団が開発した最新のシングルボードコンピュータで、従来モデルよりも大幅な性能向上を実現しています。

搭載される64ビットクアッドコアプロセッサは、クロック速度が最大2.4GHzに達し、前世代よりも処理速度が格段に向上しました。また、4GBまたは8GBのRAMを選択できるため、教育用途からリソースを必要とするプロジェクトまで幅広く対応可能です。
グラフィックス性能も強化され、4K解像度でのデュアルディスプレイ出力をサポートしています。さらに、新たにPCIeインターフェイスが追加され、外部ストレージや高速デバイスとの接続が容易になりました。Wi-Fi 6やBluetooth 5.2の導入により、無線通信も高速かつ安定。
教育、IoT、AI開発、メディア再生など、多様な用途に対応するRaspberry Pi 5は、初心者から上級者まで幅広いユーザーにとって魅力的な選択肢となっています。
Raspberry Piでできることについては以下の記事で解説していますので、あわせてご覧ください。



やりたいこと
例えば、人間や犬を発見すると近寄ってくる、あとをついて歩いてくるような動作をロボットにさせたいと思っています。
そんな時、ロボットが「追跡する目標を発見する」というのは、ディープラーニングを使えば可能です。そして目標に近づくためには、「ロボットをどちらの方向に向ければ良いか」を判断する必要があります。その方向を判断をするための処理実装してみました。
以下の図のように、ロボットを追従させてい犬がいるとします。
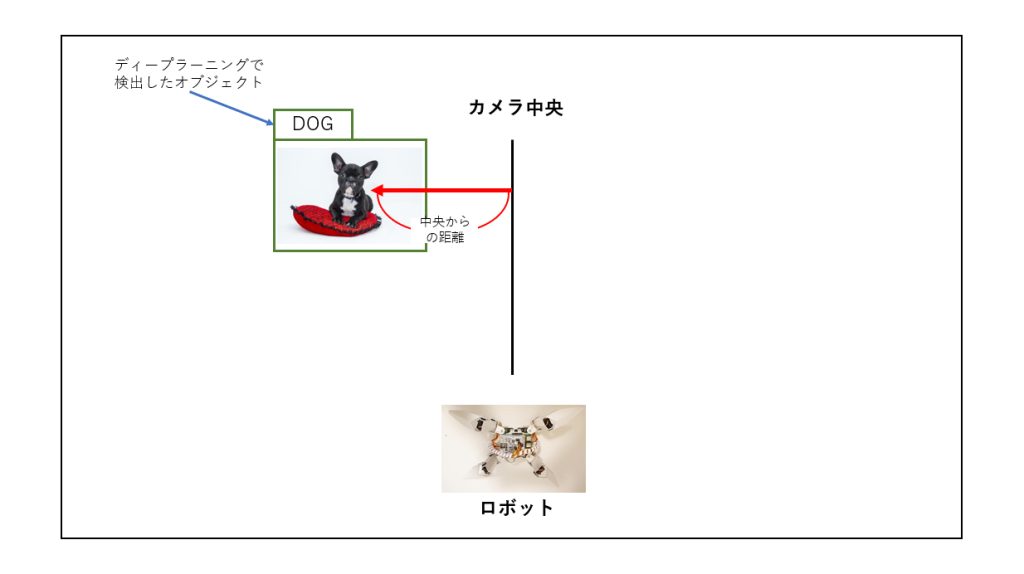
その場合、まず検出した「犬」というオブジェクトがカメラの中心から右側にいるのか、左側にいるのかによって、ロボットが回転するべき方向を判断します。
そして、次に中心からオブジェクトまでの距離によって、どれくらいの角度を回転させれば良いのかを判断するという流れになります。

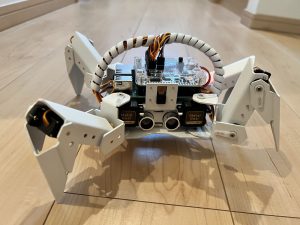
使用するロボット
使用するロボットはRaspberry Piベースのスパイダーロボット、PiCrawlerです。
詳細は以下のページをご覧ください。
環境
ハードウェア:Raspberry Pi 3 ModelB
OS:Raspbian 10.11
OpenCV:4.1.0.25
カメラ:OV5647
TensorflowLite-bin:2.5.0
ディープラーニングによる物体検出
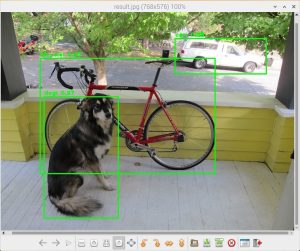
Googleが公開している機械学習のソフトウェアライブラリ、TensorFlow Liteを使って物体検出をするプログラムを実装したことを以前記事にしました。
今回はこのPINTO氏がチューニングされた高速推論処理エンジン、TensorflowLite-binのソースコードをベースに、改良したものを実装してみました。
PINTO氏のGithubリポジトリは以下となります。


作成したソースコード
今回は先ほど紹介したPINTO氏の公開しているリポジトリにある「mobilenetv2ssd-sync-usbcam.py」のソースコードを一部改変する形で実装しましたので、その部分だけ紹介します。
このソースファイルの「overlay_on_image」というメソッドに、検出したオブジェクト部分に枠線とラベルを描画する処理が実装されています。
以下のように改変することで、画面上の座標情報を計算できるようにしました。
def overlay_on_image(frames, object_infos, camera_width, camera_height):
color_image = frames
if isinstance(object_infos, type(None)):
return color_image
img_cp = color_image.copy()
#座標情報を取得
img_bottom = img_cp.shape[0] #画像の高さを取得
img_right = img_cp.shape[1] #画像の横幅を取得
#通信の座標を取得
img_bottom_center = int(img_bottom / 2) #中心点 高さ
img_right_center = int(img_right / 2) #中心点 横幅
for obj in object_infos:
#オブジェクトの座標を取得
box_left = int(obj[0][0])
box_top = int(obj[0][1])
box_right = int(obj[1][0])
box_bottom = int(obj[1][1])
#オブジェクトの中心点を取得
box_right_center = int(box_left + ((box_right - box_left) / 2))
box_bottom_center = int(box_top + ((box_bottom - box_top) / 2))
#座標情報を出力
print("box_right_center", box_right_center)
print("box_bottom_center", box_bottom_center)
#画面の中心からオブジェクトの中心まで直線を引く
cv2.line(img_cp, (box_right_center, box_bottom_center), (img_right_center, img_bottom_center), (0, 0, 255), 3) #第2引数:始点 第3引数:終点
#オブジェクトのX軸方向の中心点までの距離
cv2.putText(img_cp, str(img_right_center - box_right_center), (box_right_center + 3, box_bottom_center + 3), cv2.FONT_HERSHEY_SIMPLEX, 0.5, label_text_color, 1)
#長方形を描画
cv2.rectangle(img_cp, (box_left, box_top), (box_right, box_bottom), box_color, box_thickness)
percentage = int(obj[2] * 100)
label_text = obj[3] + " (" + str(percentage) + "%)"
print("Label = ", label_text)
label_size = cv2.getTextSize(label_text, cv2.FONT_HERSHEY_SIMPLEX, 0.5, 1)[0]
label_left = box_left
label_top = box_top - label_size[1]
if (label_top < 1):
label_top = 1
label_right = label_left + label_size[0]
label_bottom = label_top + label_size[1]
cv2.rectangle(img_cp, (label_left - 1, label_top - 1), (label_right + 1, label_bottom + 1), label_background_color, -1)
cv2.putText(img_cp, label_text, (label_left, label_bottom), cv2.FONT_HERSHEY_SIMPLEX, 0.5, label_text_color, 1)
cv2.putText(img_cp, fps, (camera_width-170,15), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (38,0,255), 1, cv2.LINE_AA)
cv2.putText(img_cp, detectfps, (camera_width-170,30), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (38,0,255), 1, cv2.LINE_AA)
return img_cp14、15行目:
画面の中心点の座標を計算します。
25、26行目:
各オブジェクトの中心点の座標を計算します。
33行目:
画面の中心から各オブジェクトの中心まで直線を描画します。
36行目:
画面の中心から各オブジェクトの中心までのX軸方向の距離を計算し、表示します。
実行結果
以下の画像のように画面の中心から各オブジェクトの中心までの距離を計算、表示することができました。
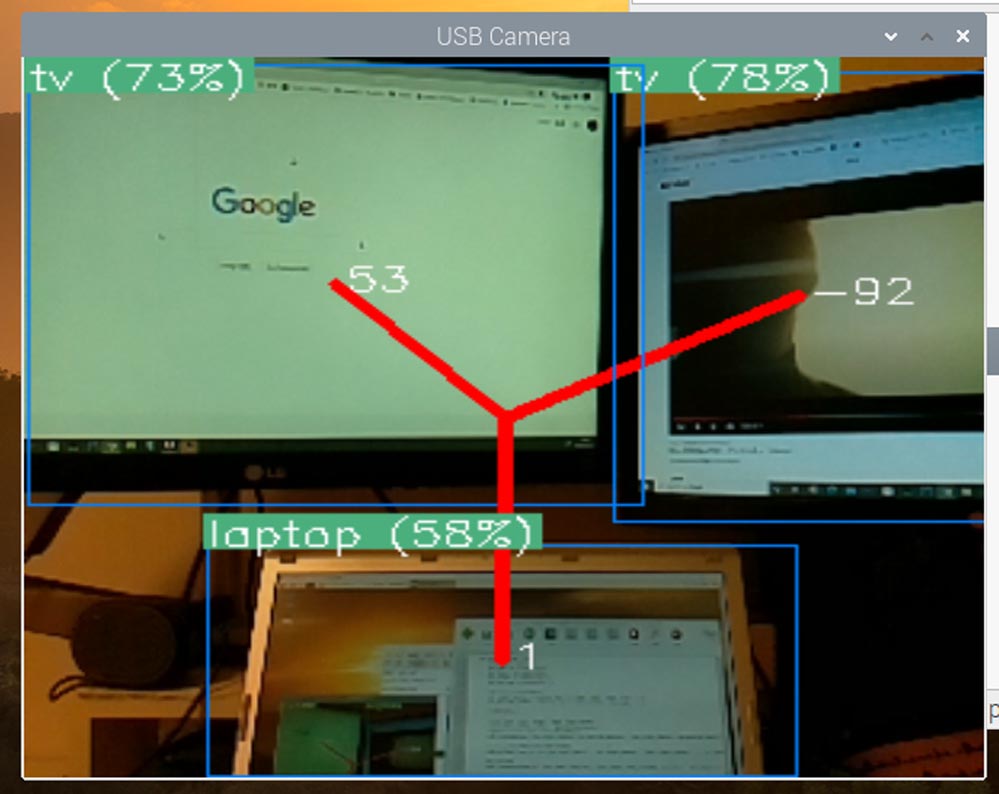
オブジェクトが画面中央より左側にある時はプラス、中央より右側にある場合はマイナスで距離が表示されます。つまり距離の符号を見て、プラスならロボットを左回転、マイナスならロボットを右回転させれば良いということになります。
また画面中央からの距離が大きければ旋回する角度を大きく、距離が小さければ旋回する角度を小さくすることで、常にロボットを目標の方向へ向けることができます。
実際に距離を計測している様子を動画で撮影してみました。
リアルタイムにオブジェクトまでの距離を計算して表示できていることが見て頂けるかと思います。
\ Pythonを自宅で好きな時に学べる! /
まとめ
今回のオブジェクトの位置計算処理を実装したことにより、カメラからロボットの行動を制御するのに必要な情報を取得することができるようになりました。
このオブジェクトの位置情報を使ってロボットを人間に追従させる機能の実装について、以下の記事で解説しています。
機械学習を学びたい方向けに、以下の記事を公開しています。

また、以下の記事で効率的にPythonのプログラミングスキルを学べるプログラミングスクールの選び方について解説しています。最近ではほとんどのスクールがオンラインで授業を受けられるようになり、仕事をしながらでも自宅で自分のペースで学習できるようになりました。
スキルアップや副業にぜひ活用してみてください。

スクールではなく、自分でPythonを習得したい方には、いつでもどこでも学べる動画学習プラットフォームのUdemyがおすすめです。
講座単位で購入できるため、スクールに比べ非常に安価(セール時1200円程度~)に学ぶことができます。私も受講しているおすすめの講座を以下の記事でまとめていますので、ぜひ参考にしてみてください。

それでは、また次の記事でお会いしましょう。


おすすめ記事












コメント