これまでに製作したロボットについて紹介するページです。現在、3号機を開発中で、このブログでもその様子を随時配信していく予定です。
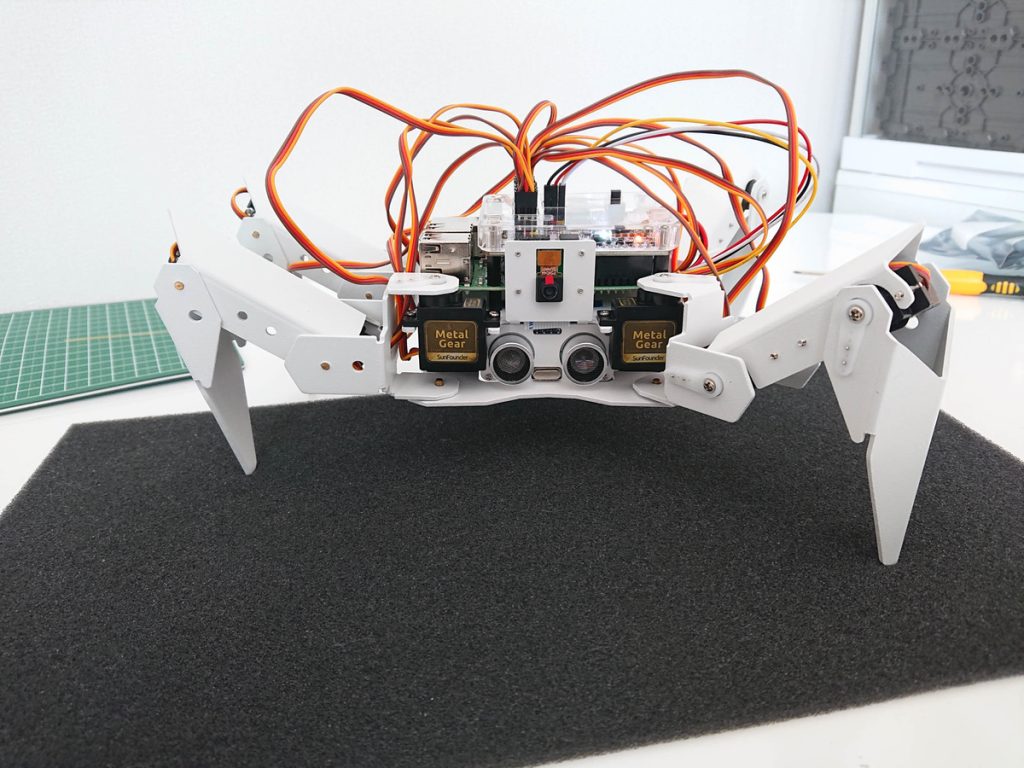
3号機 SunFounder PICRAWLER FOR RASPBERRY PI
Raspberry Piをコントローラーとして動作するスパイダーロボット、PiCrawlerです。
メーカーから本製品用のRaspberry Pi OSが提供されており、ロボットのコントロールや画像処理などのプログラムを、通常のRaspberry Piでアプリ開発するのと同じようにプログラミングして動かすことが可能です。
またメーカーからPythonのハードウェア制御ライブラリや、サンプルのソースコードも公開されています。
動作させている動画
購入したキット
SunFounderの iCrawlerのキットは以下のAmazonや国内のロボット関係のショップから購入することができます。

特集ページ
SunFounderのスパイダーロボット PiCrawlerについては以下の特集ページで全ての記事をまとめていますので、ぜひご覧ください。
3号機は現在ソフトウェアを開発中で、今後もどんどんアップデートしていく予定です。進捗はこのブログで都度報告していく予定なので読んで頂けると嬉しいです。
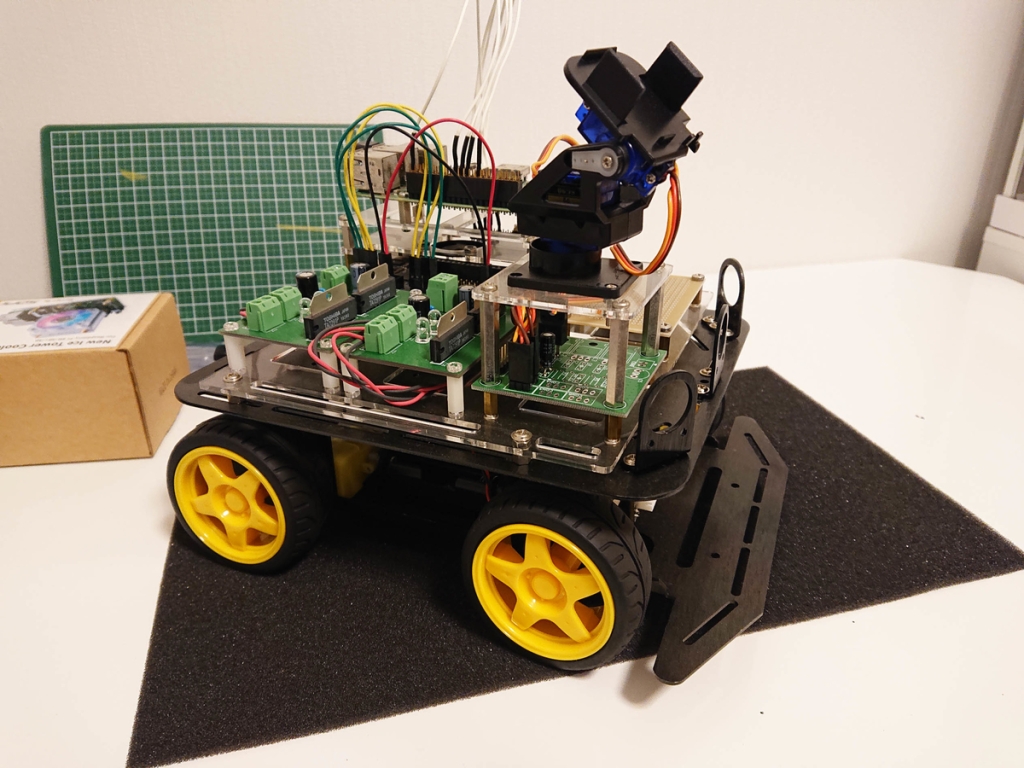
2号機
2台目のロボットです。このロボットではRaspberry PiはUIとの通信や画像処理を行い、モーター制御は同じくシャーシに実装されたFPGAボードでやっていました。駆動用モーターも各車輪に1つづつの計4つに増え、カメラマウントにも2つのサーボモーターが装着されています。
1号機
一番最初に製作したRaspberry Piをコントローラにしたロボットです。ロボットのシャーシ、DCモーター、車輪がセットになっているキットをアマゾンで購入して製作しました。モータードライブ回路はユニバーサル基板で実装しました。
動作させている動画
TA7291Pを使ってDCモーターを駆動しています。このころはまだPWMを使っておらず、ON/OFF制御のみでした。
スマホをコントローラーにして、ソケット通信をしながら制御しています。
紹介記事
