今回は先日キット内容をレビューした「プログラミング工作シリーズ No.01 マイコンロボット工作セット クローラータイプ」を組み立ててみましたので、動作テストも含めてレビューします。
お子さんのプログラミング教育にも活用できるキットですので、ぜひ参考にしてみてください。
使用するキット
今回、組み立てを行うのは先日レビューしたタミヤの「プログラミング工作シリーズ No.01 マイコンロボット工作セット クローラータイプ」です。こちらのキットはAmazonなどで購入可能です。

タミヤ プログラミング工作シリーズ No.01 マイコンロボット工作セット クローラータイプ 71201
キット内容については前回のレビュー記事でまとめています。

ロボット本体に加えて、コントローラーとなるmicro:bitやセンサーなどの電子部品類も全てキットに付属していますので、単3乾電池2本とPCを用意するだけで使用できます。
組み立て
さて、ここからは実際に組み立ての工程を紹介していきます。
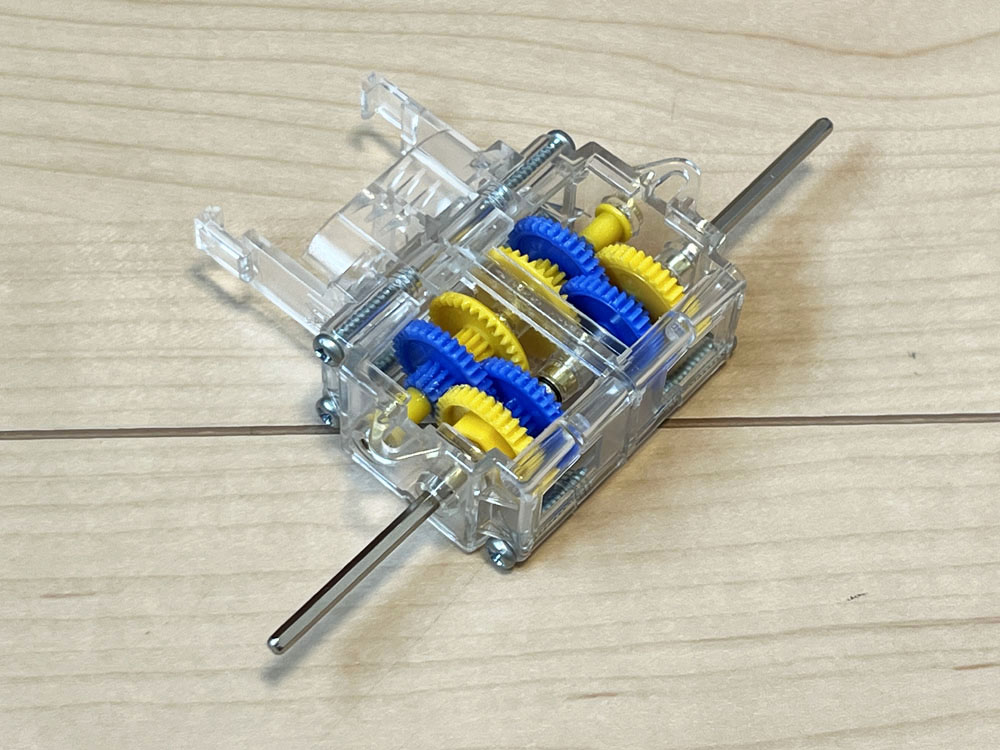
まず最初はギアボックスの組み立てです。このギアボックス自体はタミヤから単体で発売されているダブルギアボックスと同じものではないかと思いますが、このキットについているのはギアボックスのケースが透明になっていました。
組んだ後、シャフトを回転させるとギアが嚙み合って回るところが見えるので、子供には好評でした。
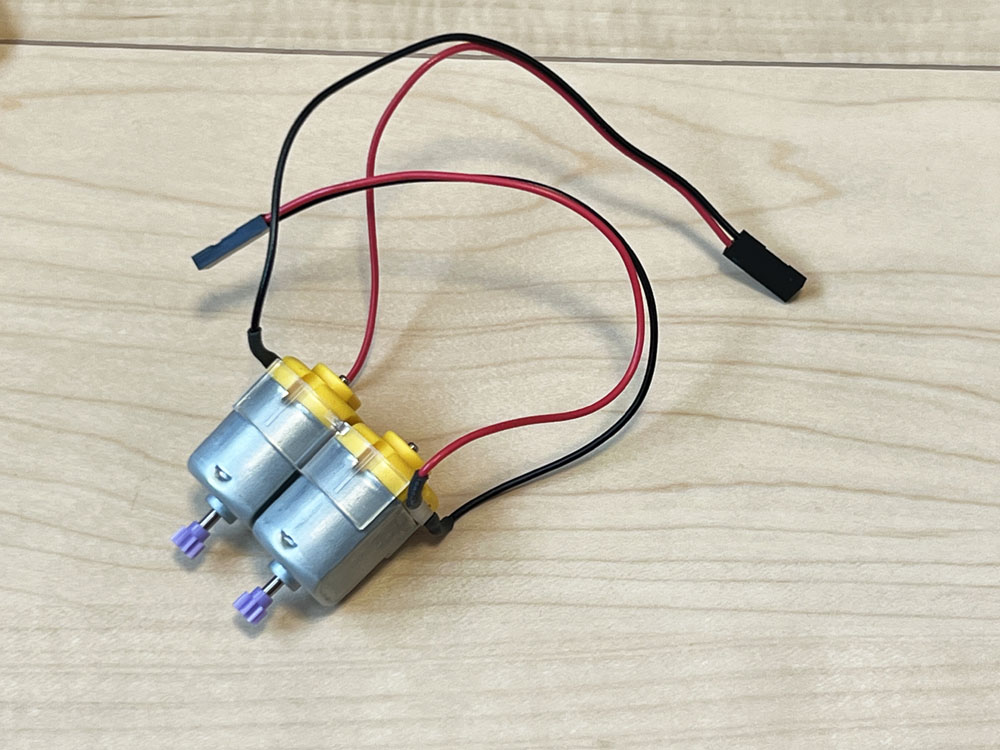
そしてこちらが付属のモータ2つになります。マブチモーターでしょうか。
ケーブル、コネクタは最初からはんだ付けされた状態となっています。
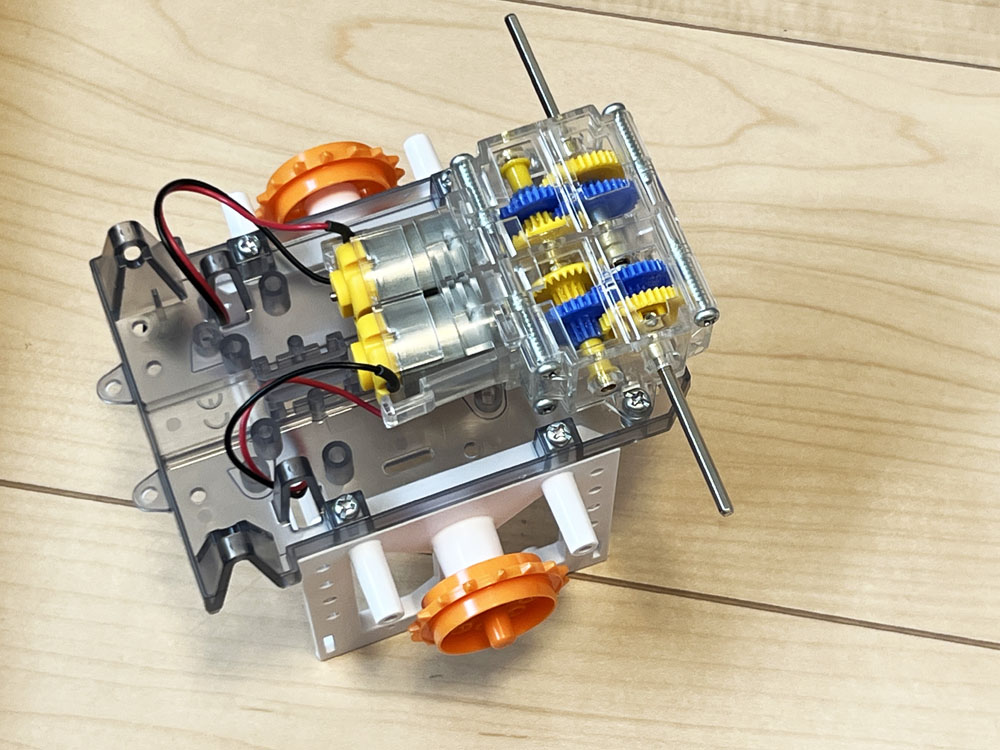
ギアボックスにモータを取り付けロボットのフレームに組み込んだ状態です。
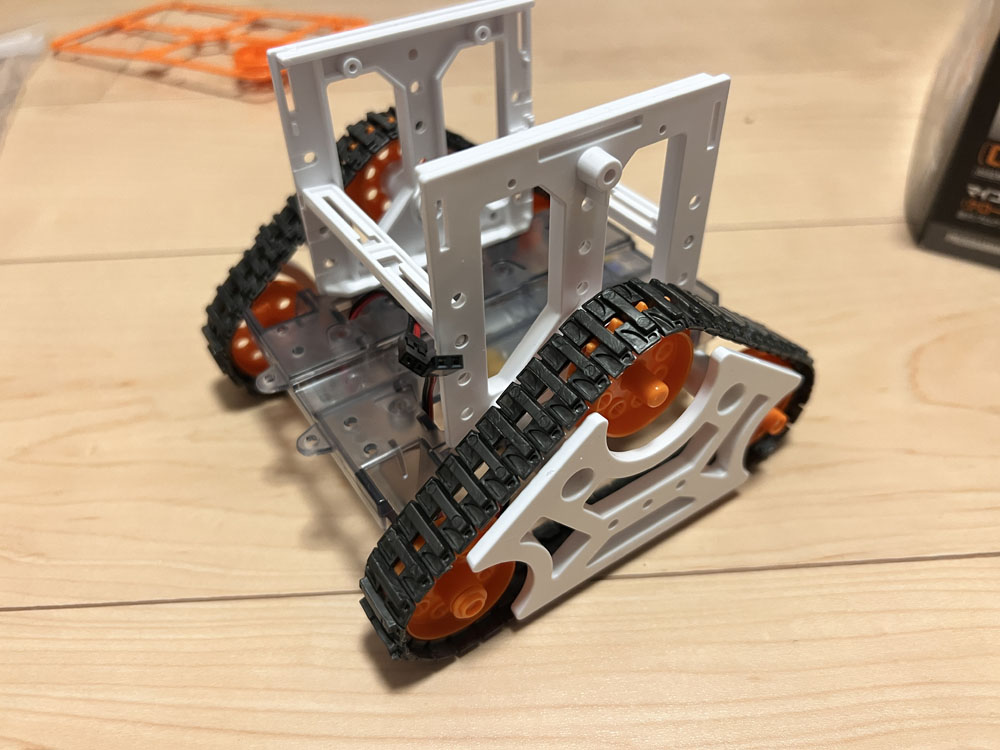
そしてキャタピラーを取り付けます。これでロボットの駆動部はほぼ完成しました。
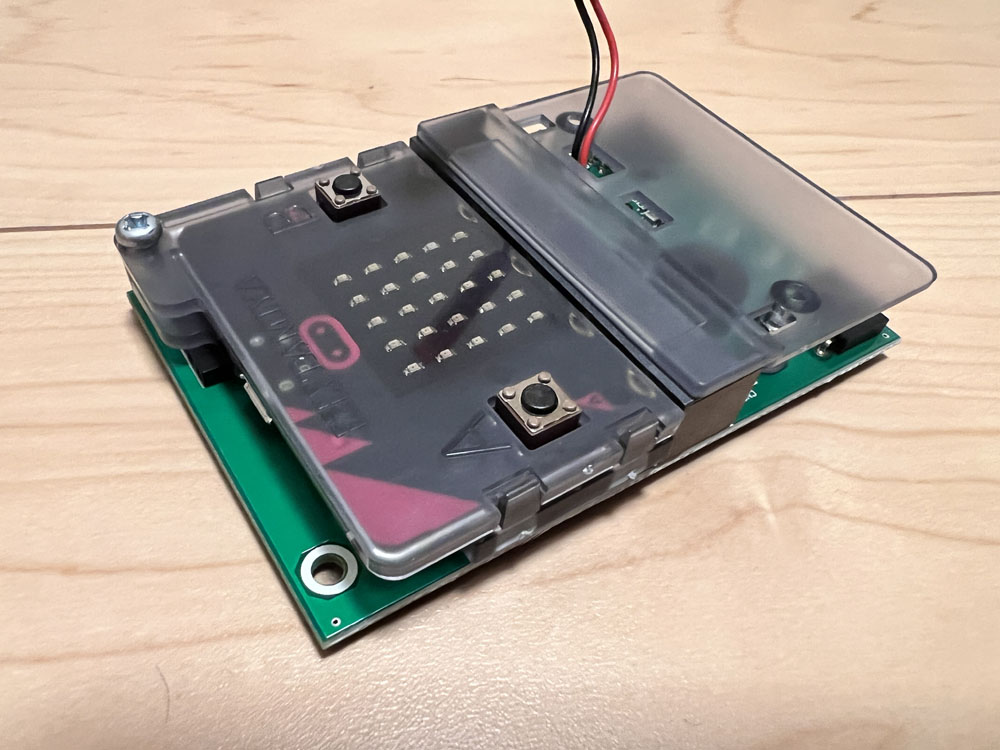
続いてこちらがロボットの制御器となるマイコンボードmicro:bit本体になります。

micro:bitの機能を拡張するベースとなる基板です。電源回路やモータの制御回路等が搭載されています。

micro:bitに保護カバーを取り付け、先ほどのベース基板に差し込みます。ここでもはんだ付け等は不要です。
micro:bitの基板上にはLEDとボタンがついており、これらを操作して動作モードを変更します。
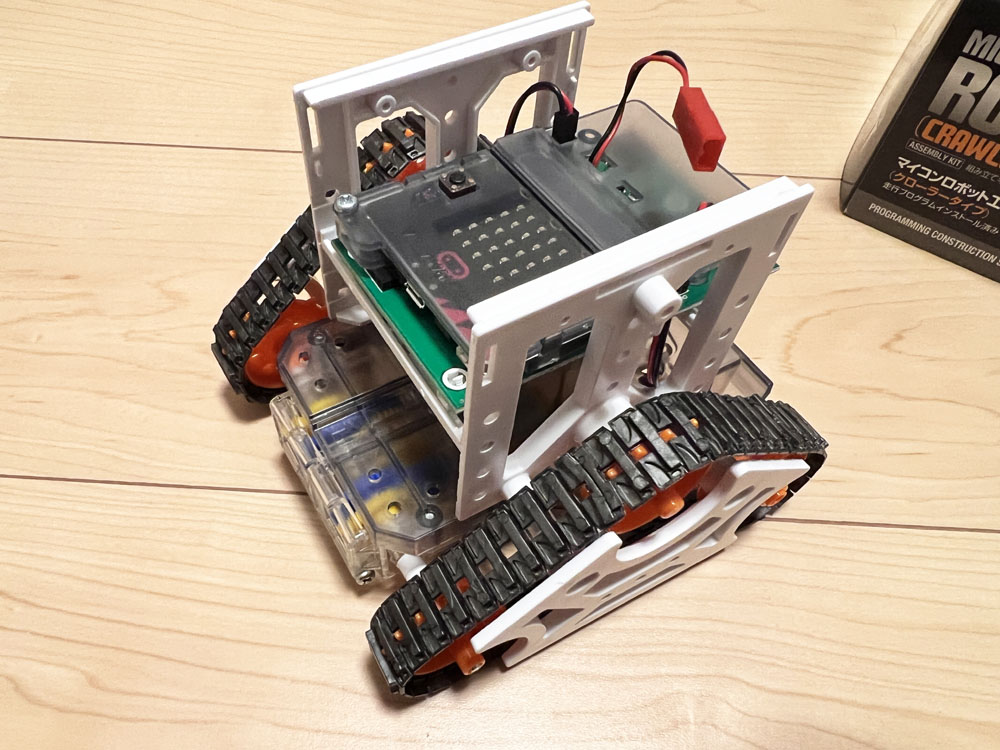
micro:bitを差し込んだ基板をロボットのフレームに取り付けた状態です。
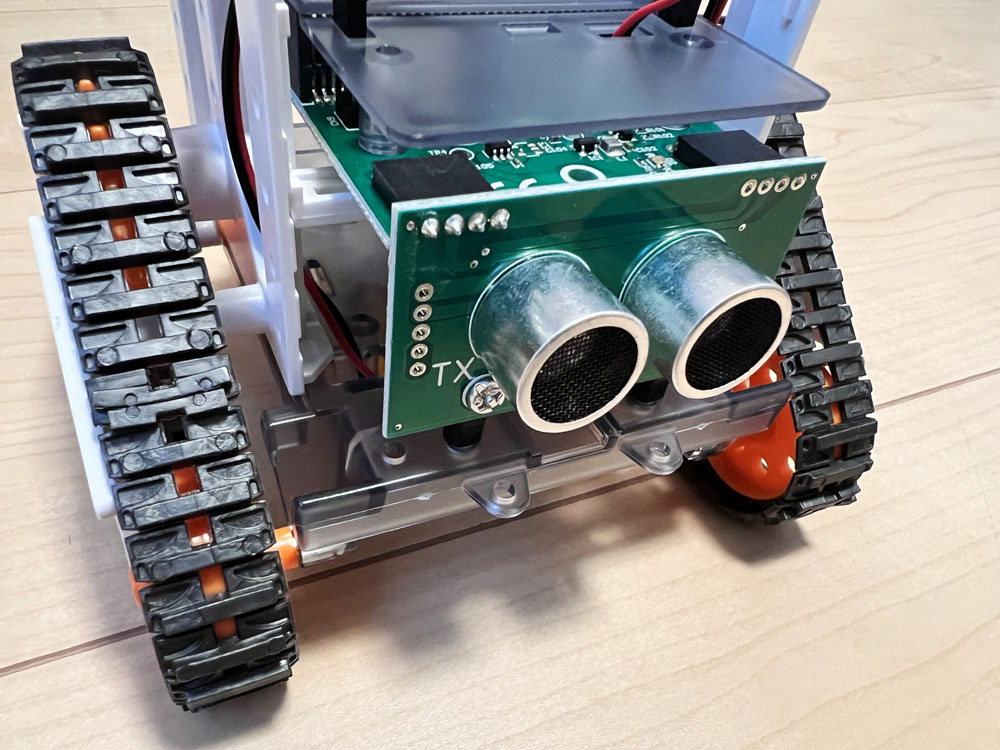
そしてロボットの前面に超音波センサーを取り付けます。こちらもコネクタに差し込むだけでOKです。
このセンサーで障害物との距離を測ることができます。
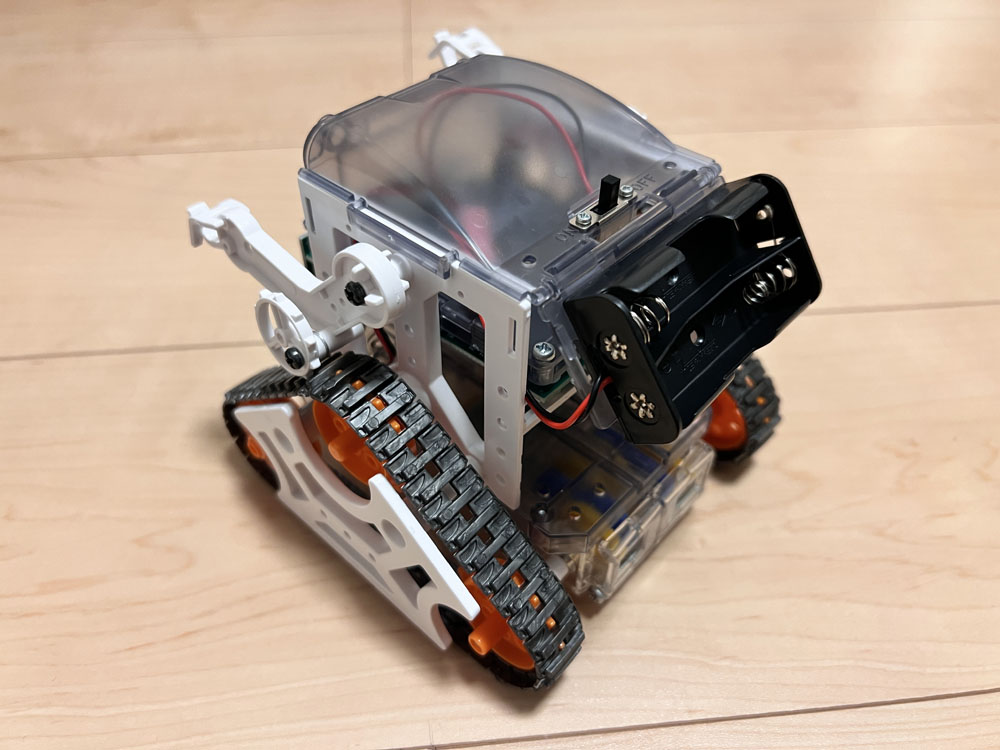
最後にロボットの腕を付けたら上部のカバーをかぶせて組み立て完了です。
ロボットの腕は特に制御したしたりするものではなく、腕についている車輪のような部分がキャタピラーと干渉することで上下に振られるといったものです。
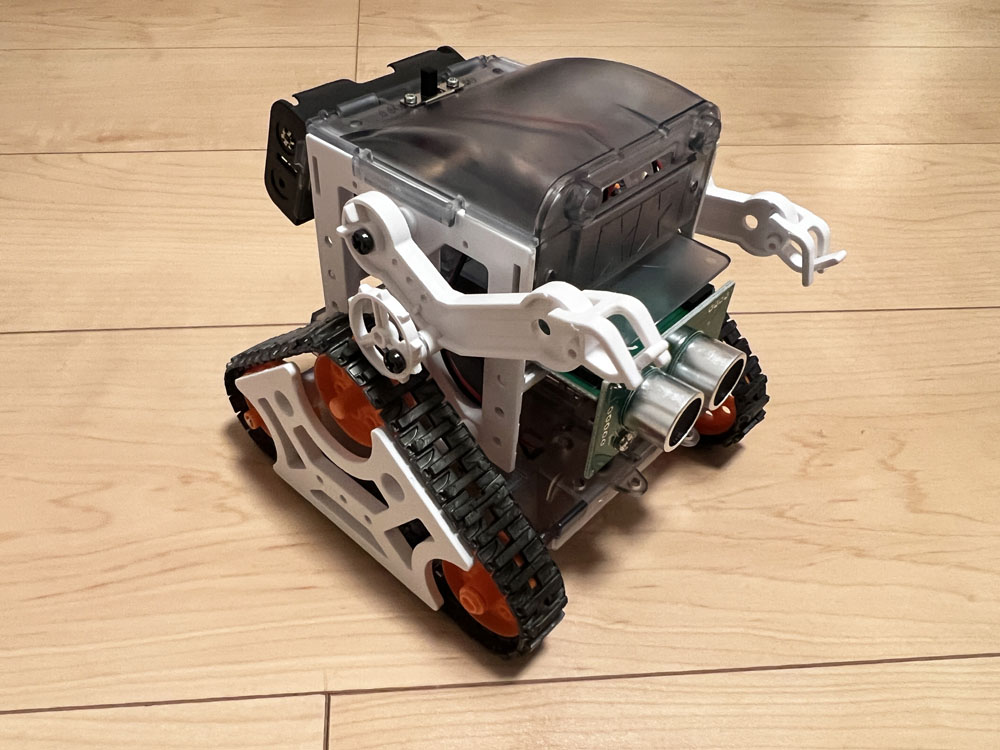
カバーの端にあるのがメインの電源スイッチです。
電池ボックスがロボット背面についているため、アクセスがしやすいです。(タミヤの他のキットはロボットのフレームを一部外さないとアクセスできないものもありました)
また、micro:bitのボタンは電池ボックス部分を上に上げることで操作が可能です。
以上で組み立ては完了です。
小学4年生の子供と一緒に作りましたが、プラモデルを作りなれていない場合や、電子工作をしたことがない場合だと親がついて組み立てる必要があるかなと思いました。
動作テスト
このキットはユーザーがプログラミングする以外に、障害物を検知、回避して自動走行するモードと、もう一台のmicro:bit(別売り)を用意してコントローラーとして操作する3つのモードが用意されています。
今回は自動走行モードを使って動かした動画を撮影しました。
このように壁の前に行くと音が鳴り、自動で向きを変えて再び進むといった感じで走行することができました。
ただ、超音波センサーの特性上、斜め45度くらいの角度だと壁を認識できずにぶつかってしまうことがありました。壁の高さは3cmほどの低い壁でも検出できました。
まとめ
今回はタミヤの「プログラミング工作シリーズ No.01 マイコンロボット工作セット クローラータイプ」の組み立てについて解説してみました。部品数はそれほど多くなく、大人が一緒に組み立てれば半日あれば作れるかと思います。
お子さんのメカやプログラミングの勉強にぜひ活用してみてはいかがでしょうか?
当サイトではRaspberry Piをベースにしたロボットの製作や制御プログラムも公開していますので、あわせてご覧ください。
また、以下の記事で効率的にPythonのプログラミングスキルを学べるプログラミングスクールの選び方について解説しています。最近ではほとんどのスクールがオンラインで授業を受けられるようになり、仕事をしながらでも自宅で自分のペースで学習できるようになりました。
スキルアップや副業にぜひ活用してみてください。

スクールではなく、自分でPythonを習得したい方には、いつでもどこでも学べる動画学習プラットフォームのUdemyがおすすめです。
講座単位で購入できるため、スクールに比べ非常に安価(セール時1200円程度~)に学ぶことができます。私も受講しているおすすめの講座を以下の記事でまとめていますので、ぜひ参考にしてみてください。

それでは、また次の記事でお会いしましょう。







コメント