PiCar-Xは、SunFounder社が販売するRaspberry Piで制御するスマートロボットカーです。
このロボットカーは2つの駆動モータと、ステアリング用サーボモーターを搭載し、高速で安定した走行が可能です。
また、PiCarに搭載されるセンサー、アクチュエーターにアクセスするためのソフトウェアライブラリが用意されており、ユーザーがプログラミングにより制御することができます。
メーカーから提供されるチュートリアルも、日本語で用意されており、動画での解説も充実しています。これからマイコンのプログラミングに挑戦してみたいと思っている方に最適な製品です。

本記事は製品をSunFounder様よりご提供頂き作成しています。
- PiCar-Xの概要と特徴
- PiCar-Xの入手先
- PiCar-Xの組み立てと操作方法
PiCar-Xとは
PiCar-XはマイコンボードRaspberry Piをコントローラとして動作するロボットキットです。

- ステアリング機構、可動型カメラマウントを装着した本格的カーロボット
- はんだ付け不要で組み立てが簡単(工具も同梱)
- 組み立て後、リモコンやスマホアプリですぐに動かせる
- Raspberry Piで制御できる(ユーザーがプログラミング可能)ため、プログラミング入門に最適
- 15000円前後と安価
後輪を2つのDCモーターで駆動し、ステアリング機構をサーボモーターで駆動することで本格的な自動車の構造を再現したロボットキットです。
また、Raspberry Piで使用できるカメラモジュールを固定するカメラマウント部にも2つのサーボモーターを搭載しており、パン・チルト(縦横振り)の制御が可能です。
これにより人間の顔やカラーオブジェクトを高度に追跡するアプリケーションが構築できます。
ロボットの動作は全てPythonのプログラミングによって制御することが可能です。
ディープラーニングを使った画像処理など、自動運転に使われる技術とプログラミングを学びたい方に最適な製品です。
PiCar-Xの入手先
SunFounder社公式サイト
PiCar-Xは開発元のSunFounder社公式のショッピングサイトで購入することが可能です。
こちらのサイトで注文すると、日本にも発送してもらえます。
Amazon
PiCar-XはAmazonでも購入可能です。
公式ドキュメント
以下がSunFounder公式の日本語ドキュメントです。
PiCar-Xのハードウェア
ここからは実際にPiCar-Xの製品を見ていきましょう。
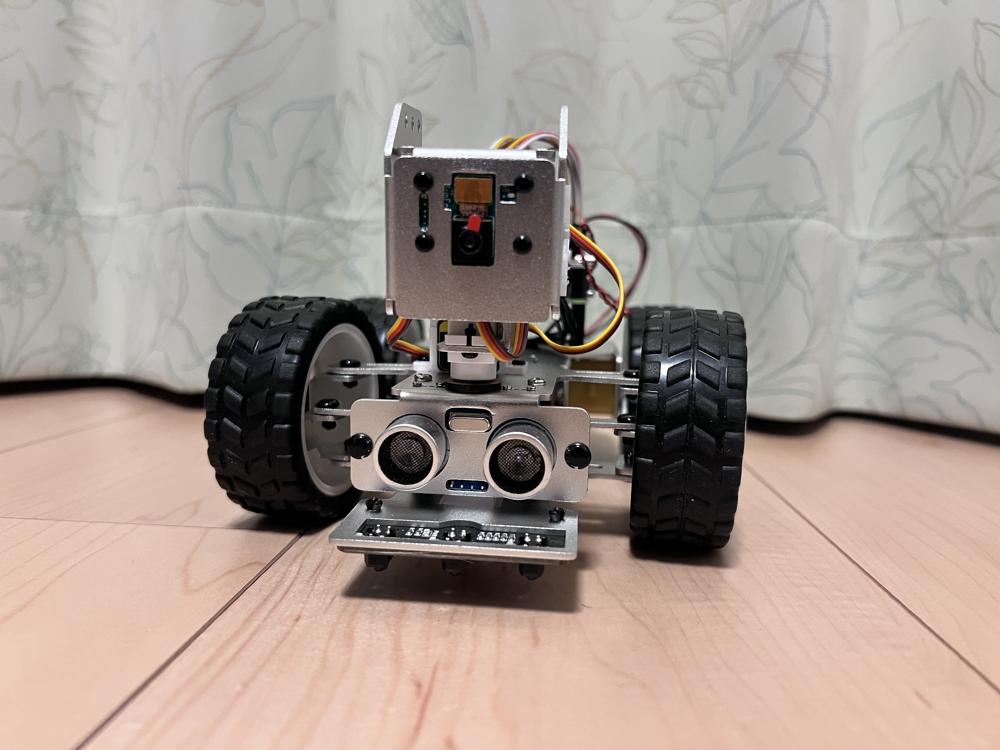
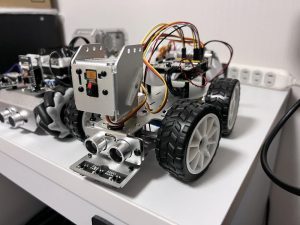
PiCar-Xの外観
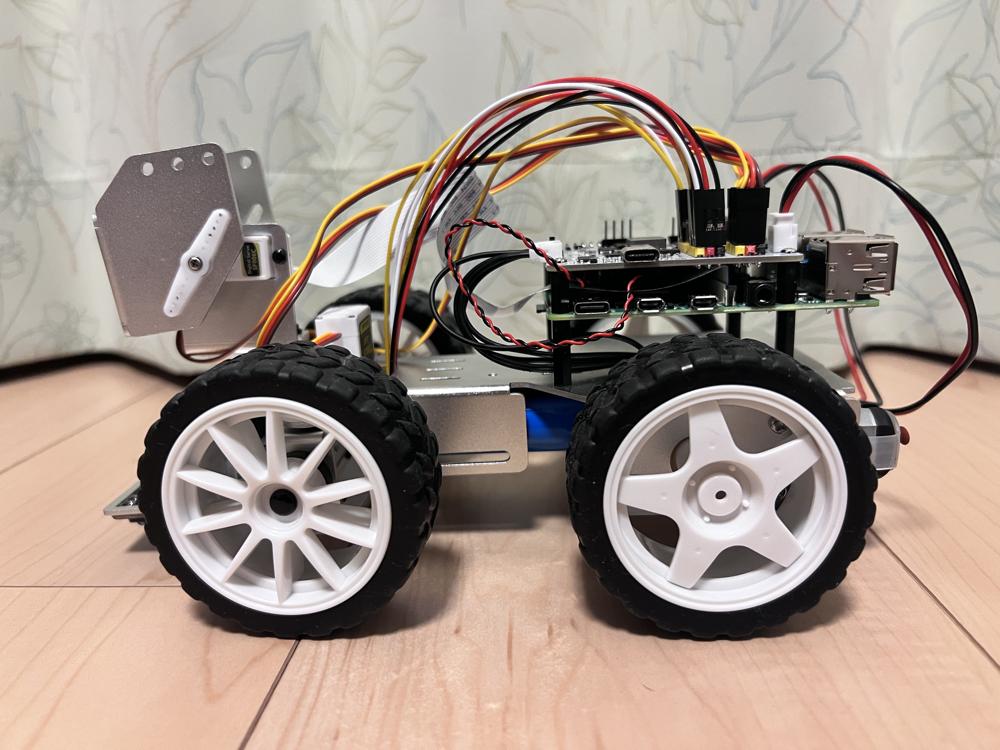
まずはPiCar-Xの外観です。
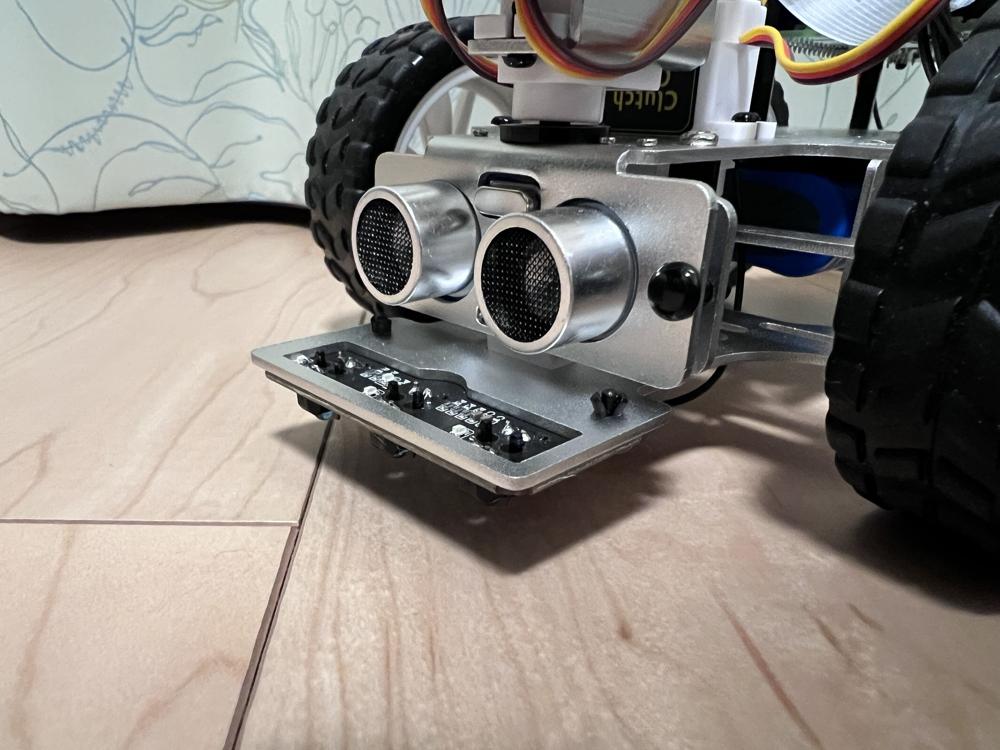
正面にはRaspberry Piに接続されたカメラモジュール、超音波センサー、グレイスケールセンサーが取り付けられています。
続いて側面です。
PiCar-Xには4つの車輪が取り付けられており、このうち駆動輪は後輪の2つになります。
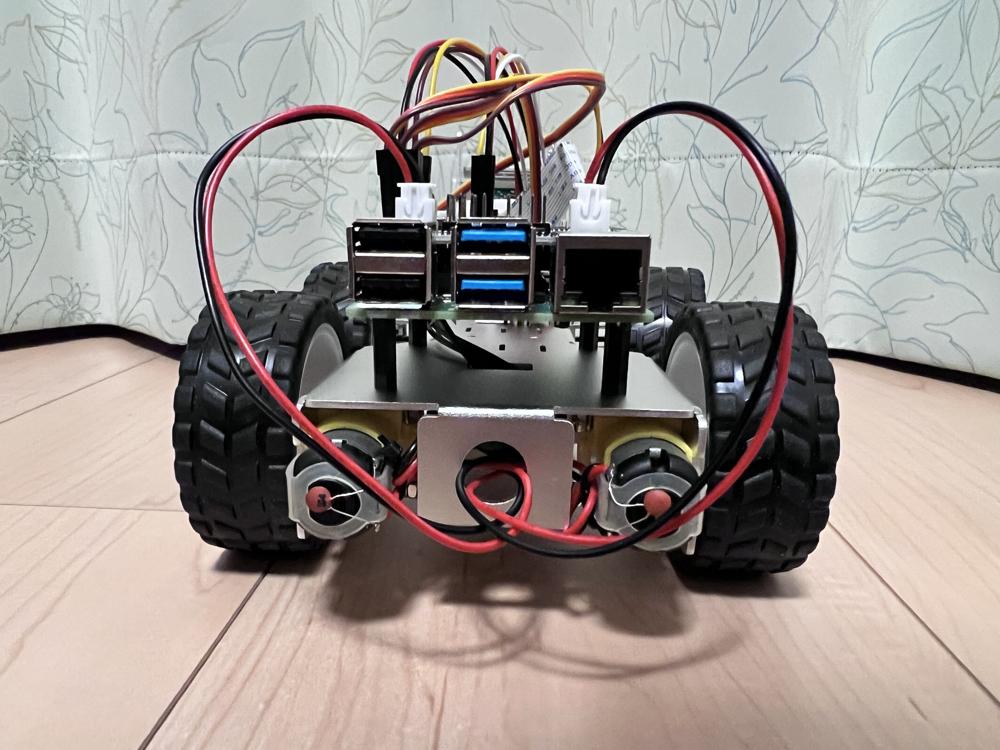
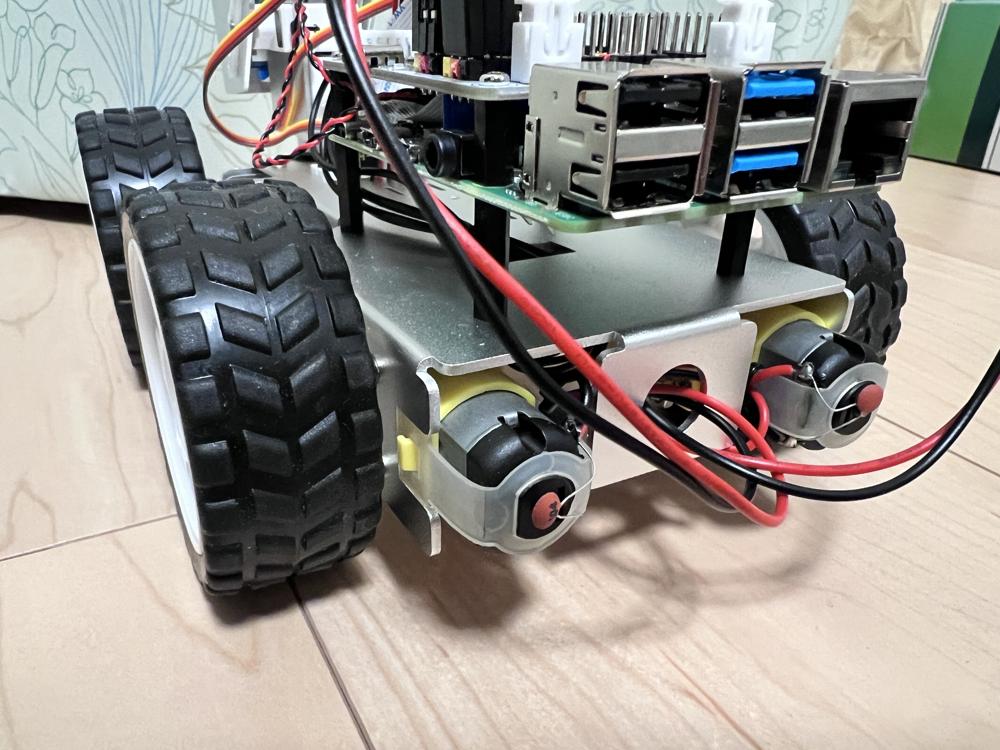
こちらが背面の写真です。
後輪を駆動するためのDCモーターとギアボックスが2つずつ取り付けられています。
PiCar-Xの各種パーツ
PiCar-Xに搭載されるパーツについて紹介します。
制御ボード(Raspberry Pi、RobotHat)
PiCar-Xの制御を行うためのマイコンボードRaspberry PiとRobot Hatです。
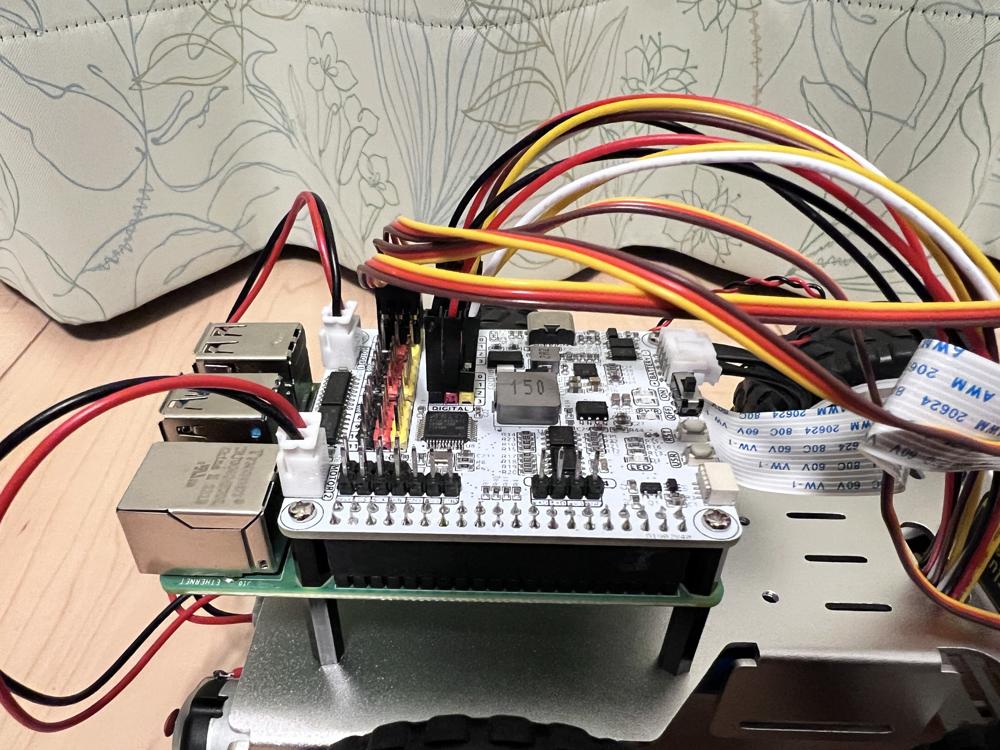
RobotHATにはサーボモーター、DCモーターの駆動回路、バッテリー制御回路、スピーカーの他ADコンバータやI2C、SPIなどのシリアル通信インタフェースまで搭載されている高機能ボードです。
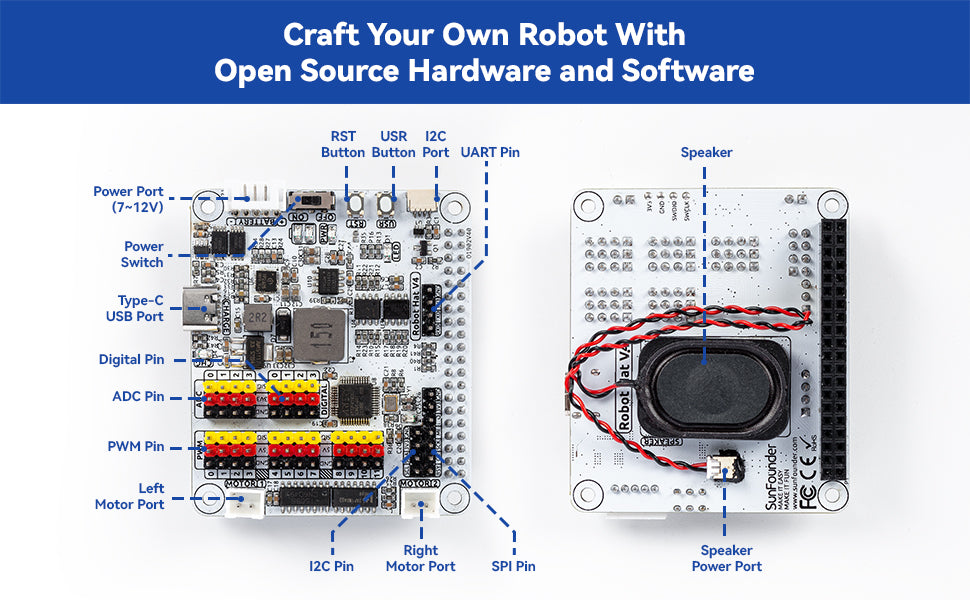
このHATをRaspberry Piに装着することで、センサー、アクチュエーター、電源の全てを制御できます。
駆動用モーター
車体を駆動するためのメイン動力となるDCモーターです。
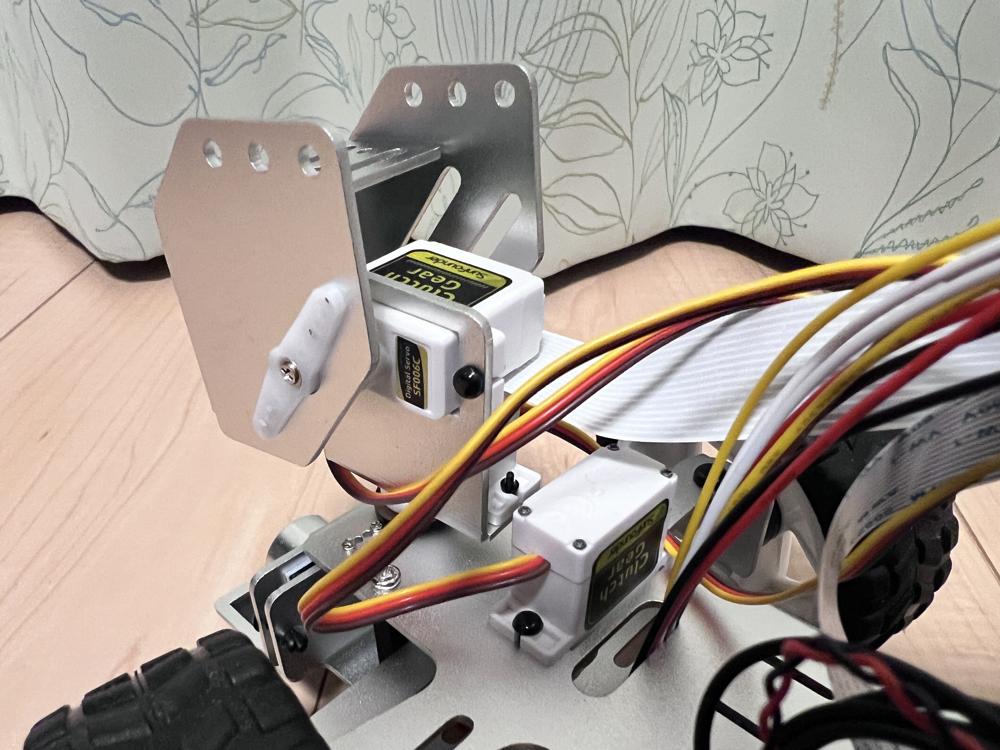
カメラマウントを上下左右に駆動するためのサーボモーターです。
このパン・チルト機構により、広い範囲のオブジェクトをカメラで認識できます。
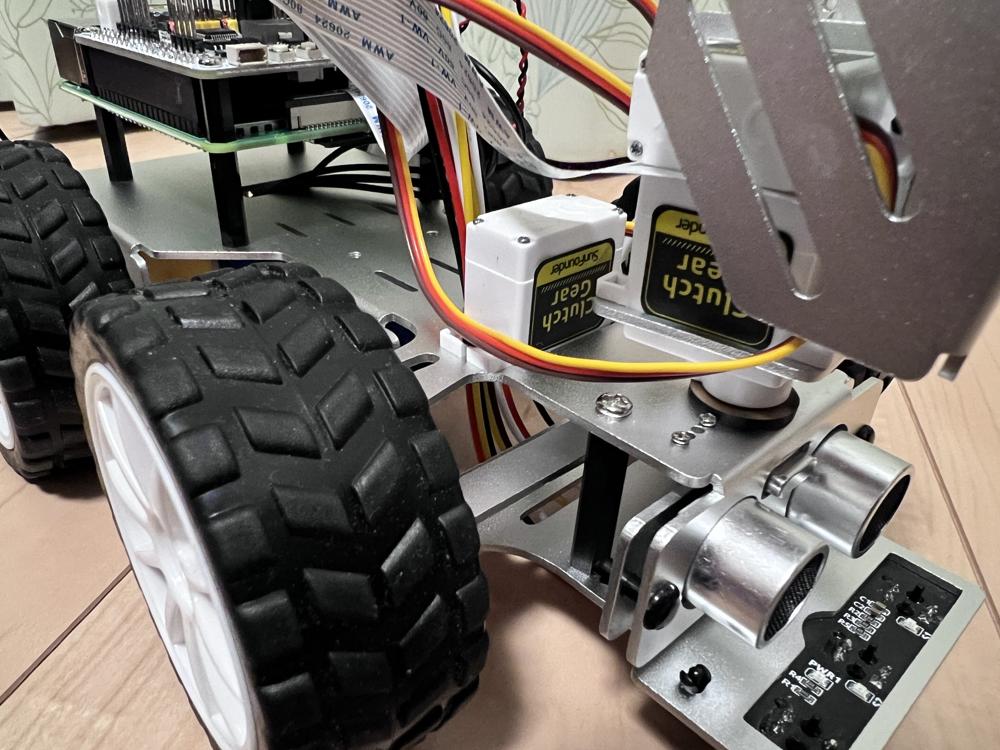
車体の中央に逆さまに取り付けられているのが、ステアリング機構を制御するサーボモーターです。
この手のロボットでは左右のモーターの駆動方向を変えてその場で回転する機種がおおいですが、PiCar-Xはこのステアリング機構により高速に走行しながら安定した旋回が可能になります。
センサー
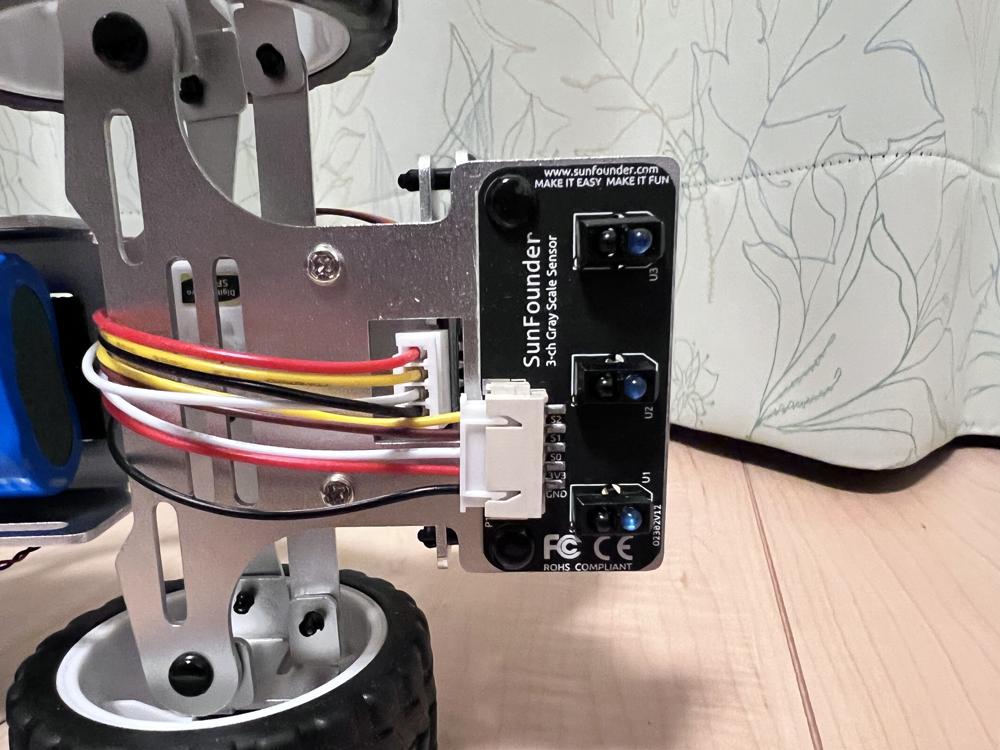
フロント底面に取り付けられたグレイスケールセンサーです。
ライントレース時の走行ラインを検出するだけでなく、なんと崖を検出することが可能です。
走行中に道が突然亡くなっているような場合、崖を検出して転落せずに停止することが可能です。
フロント部についている超音波センサーHC-SR04距離センサーです。
超音波で正面方向の障害物までの距離を計測します。
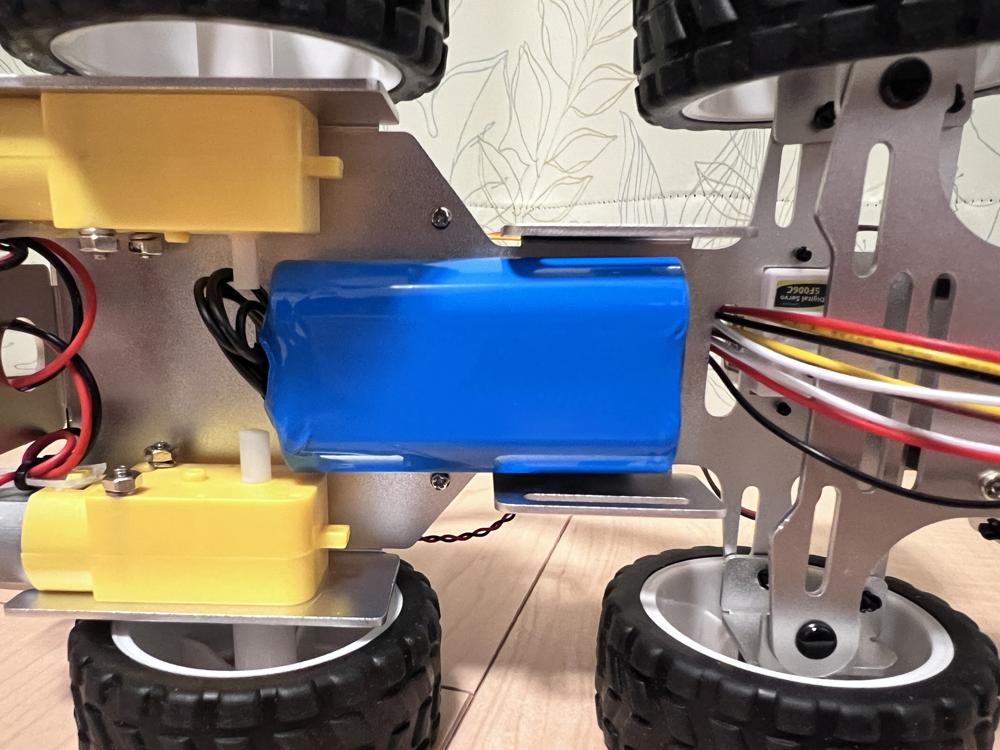
バッテリー
こちらがマイコンボードとモーター、センサーを駆動するためのバッテリーです。
RobotHATに充電制御回路が搭載されていますので、本体から取り外さずに充電できます。
PiCar-Xの組み立て
PiCar-Xのキットは工具類も付属しており、基板や配線もすべてコネクタが取り付けられているため、はんだ付け不要で簡単に組み立てが可能です。
詳細な組み立て方法は以下の記事で解説しています。
PiCar-XのPythonサンプルプログラムと実際の動作
PiCar-XはRaspberry Piを搭載していますので、Pythonのプログラムを記述することで動作を制御することができます。
PiCar-Xのソフトウェアをインストールすることで、様々なサンプルプログラムを実行し、動作を確認することができます。
キーボード制御
PiCar-Xをキーボードで制御するサンプルプログラムです。
コマンドプロンプトで以下のコマンドを実行してください。
cd ~/picar-x/example
sudo python3 2.keyboard_control.pyサンプルプログラムが実行されると以下のキーによりPiCar-Xの動作を制御できます。
w: 前進
a: 左に曲がる
s: 後退
d: 右に曲がる
i: 頭を上げる
k: 頭を下げる
j: 頭を左に向ける
l: 頭を右に向ける
ctrl + c: 終了
顔検出、追跡
PiCar-Xに搭載されたRaspberry Piカメラモジュールで顔検出を行い、顔が画面の中央に来るようにカメラマウントを制御します。
cd ~/picar-x/example
sudo python3 8.stare_at_you.pySSHでは実行できませんので、VNC、リモートデスクトップ等で実行してください。
プログラムが実行されると、前に立っている人の顔をカメラが追いかけます。
まとめ
PiCar-Xは、SunFounder社が販売するRaspberry Piで制御するスマートロボットカーについて解説しました。
Raspberry Piとモーターを使った車両制御や、Raspberry Piカメラモジュールを使った画像処理に挑戦してみたい方におすすめの製品です。
Raspberry PiとPythonで制御プログラムを作成してみたい方は是非チェックしてみてください。
それでは、また次の記事でお会いしましょう。








コメント