今回は講談社サイエンティフィク様から『ROS2とPythonで作って学ぶAIロボット入門』を献本頂きましたので、内容についてレビューさせて頂きます。
私自身、ロボティクスは全くの素人で趣味で自律走行するロボットを製作し、その過程を当ブログやX(Twitter)でも発信しています。
そんな素人の私でも理解できる非常に丁寧でわかりやすい解説でしたので、これからロボット開発をしてみたいという方にはぜひ手に取って頂きたい1冊です。

ロボット開発の全体像と自分の立ち位置、目標がわかる
ロボット開発を学ぼうとすると、最初に悩みがちなのが「何から手をつければいいの?」「そもそも、何をどこまで学べばいいの?」という全体像の見えづらさではないでしょうか。
ネット上にはたくさんの技術解説やコードサンプルがありますが、そういった情報はどれもバラバラで、全体を通して理解を深めるにはハードルが高いかと思います。
そんな中、『ROS2とPythonで作って学ぶAIロボット入門』は、ロボット開発の道のりを体系的に示してくれる教科書のような書籍です。
「今自分がどこにいて、次に何を学べばいいのか」が自然と見えてくる構成になっているのが入門者には非常にありがたいポイントです。
本書では、学習の目標の一つとして「RoboCup(ロボカップ)」が紹介されていますが、これがとても効果的な指針になっています。
RoboCupとは、ロボットによるサッカー競技やレスキュー活動、家庭での支援などをテーマにした国際的なロボットコンテストで、世界中の研究者やエンジニアが最先端の技術を競い合う場でもあります。
このRoboCupをゴールに見立てることで、「どんな技術が必要なのか」「どこまでスキルを伸ばせばいいのか」がグッと具体的になります。
たとえば、次のようなスキルが必要になってきます:
- センサーデータ処理(例:LiDAR、カメラ)
- 自己位置推定と地図作成(SLAM)
- 音声認識によるインタラクション
- ロボットアームによる物体操作(マニピュレーション)
- 各種技術の統合による自律的な意思決定と行動(プランニング)
本書は、それらの要素技術をROS2とPythonを用いて段階的に解説しており、読者が「今、どのステップにいるのか」「どのスキルを次に身につけるべきか」を自然と理解できる構成になっています。
以下の写真は私が現在製作しているロボットですが、ロボットアームやマイクは搭載していないので、本書を読んでまずは経路探索を1つのゴールとして設定してみようと思いました。
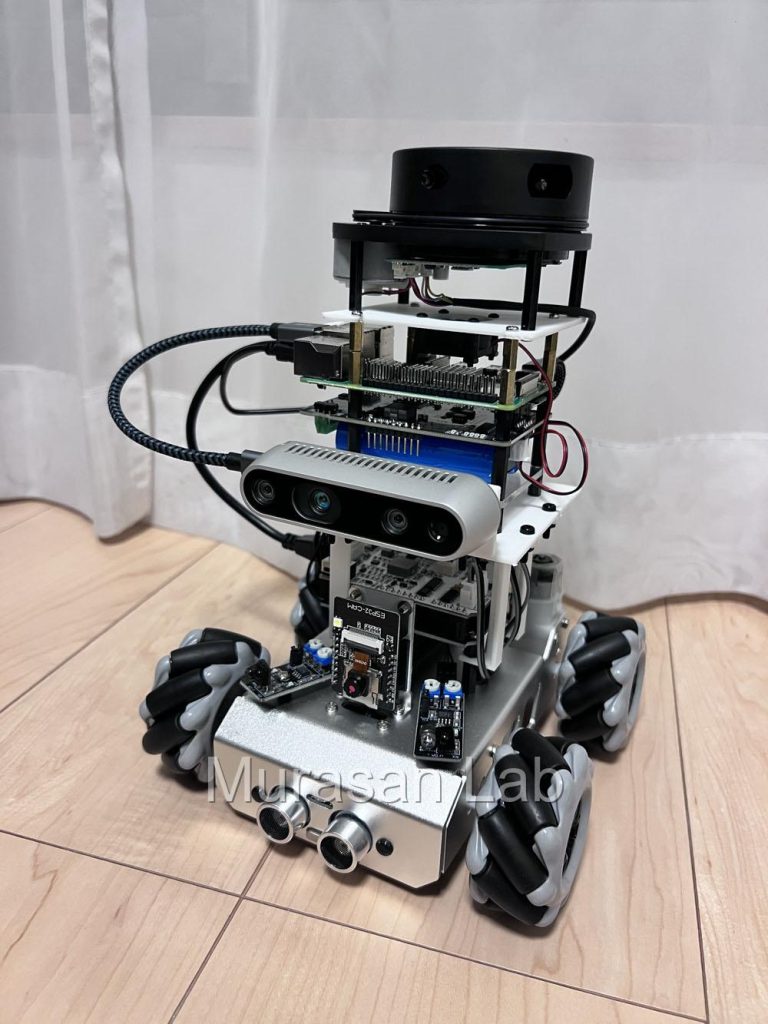
RoboCupのような現実的かつ高度な課題を視野に入れながら学習を進めることで、自分の目標を具体的にイメージしながら、ロボット開発の道のりを一歩ずつ着実に進んでいくことがでと思います。
ROS2の環境構築と実装手順
ROS2の学習を始めようとする初心者が最初に直面する大きな壁は、環境構築の複雑さです。
特にインストールや依存関係の解決といった初期設定は煩雑になりがちですが、本書ではこの課題に対して、セットアップ済みのDockerコンテナ環境が用意されているという大きな利点があります。
これにより、読者は複雑なインストール作業に悩まされることなく、すぐにアプリケーションの開発に取り掛かることができます。
実際に私自身も仕事の合間に行っていたこともあり、Raspberry PiにUbuntuをインストールし、ROS2環境をセットアップするまでにかれこれ半年くらいかかってしまいました。
本書では、初心者のつまずきポイントに対して、ROS2環境のセットアップワークスペースの構成、ビルドシステム(colcon)を用いたビルド手順まで、各ステップが丁寧に解説されています。
さらに、環境構築にとどまらず、ROS2における基本的なノードの作成方法、トピック通信の仕組み、Publisher/Subscriberの実装方法といった、実際にロボットを制御するための基礎技術をPythonコードとともに学べます。
以下の記事ではトピック通信を使用して実際にロボットを動かしている動画を公開していますので、あわせてご覧ください。

Web上では、これらの情報が散在しており、「どうやって環境を整え、どこから実装に入るべきか」が分かりにくいのが現状です。
しかし本書では、ROS2の開発フローをひとつの学習ストーリーとして体系的に提示してくれるため、自然な流れで手を動かしながら学んでいくことが可能です。
LiDARを買って点群として表示した後何する?
現在では2D LiDARセンサーはかなり安価に入手できるようになりました。私もSLAMTEC社のLiDARを愛用しています。(現在2つ目)

こちらが実際に使用しているRPLIDAR A1M8の本体です。Amazonで1万5千円ほどで購入しました。


2D LiDARセンサーを購入し、ROS2を使って点群データを可視化するところまでは到達できたものの、「その後、何をすればよいのか分からない」と思う方も多いのではないでしょうか?
以下の写真は私のロボットにLiDARを搭載した写真です。LiDARを動作させ、RVizでスキャン結果を表示するまでのチュートリアル的な記事はネットでもたくさんなるのですが、その先の情報がなかなか拾えませんでした。
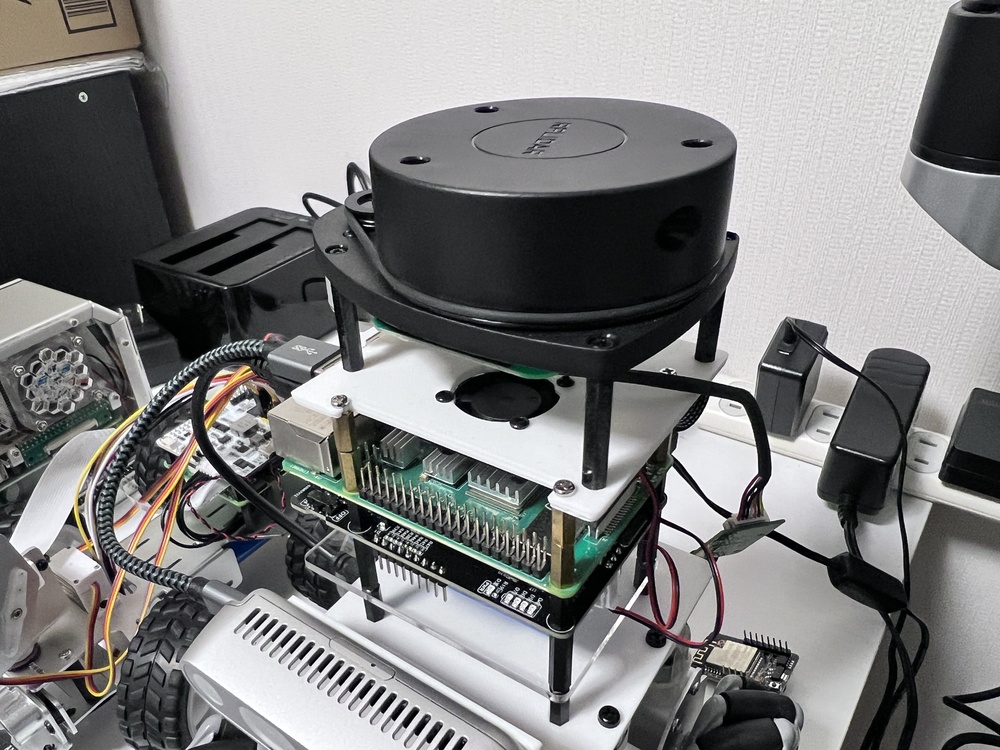
本書『ROS2とPythonで作って学ぶAIロボット入門』では、LiDARデータの扱い方からSLAM(自己位置推定と地図作成)へのステップアップまでを、丁寧に解説しています。
単に点群を表示するだけでなく、そこから地図の生成、自己位置推定へとつなげる一連の流れが解説されているため、「点群の次に何をすべきか」がはっきりと分かります。
さらにうれしいのはは、RVizを使ったデータの可視化方法が、豊富なスクリーンショットとともに詳細に説明されていることです。
RVizは強力なGUIツールですが、設定項目が多く、慣れていないとエラーで表示できないことも多々あります。私もRVizの設定方法をネットで調べながら進めていたのですが、なかなか進まずに数カ月放置してしまっていました。
本書では、RVizの基本操作から、表示の設定、マップ情報の作成、初期姿勢、ゴールの設定まで手順付きで丁寧に解説しており、「RVizで見える化がうまくできない」という初心者の悩みを解消してくれます。
マニピュレーションもシミュレーションで学べる
ロボット開発において、物体を掴んだり動かしたりする「マニピュレーション」は高度な技術分野の一つであり、手を動かして学ぶには本物のロボットアームが必要だと思われがちです。
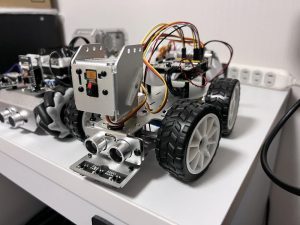
以下の動画はX(Twitter)で凄いロボットの数々を開発されている東海林さんが所有されているロボットですが、上部にロボットアームが取り付けられています。
このような高性能なアクチュエータは高価であり、また使ったことがないとどのような要件で製品を選べばよいかも悩みどころです。
しかし、本書ではロボットアームの制御をシミュレーション環境で学べる構成となっており、ハードウェアを持っていない読者でも学べる内容となっています。
マニピュレーションの章では、順運動学(Forward Kinematics)と逆運動学(Inverse Kinematics)の理論的背景がわかりやすく解説されています。これらの理論を数式ベースで理解した上で、ROS2とPythonを用いた実装をハンズオンで学ぶことができます。
特に嬉しいのは、Gazeboなどのロボットシミュレーション環境を活用した動作確認の手順が丁寧に説明されている点です。仮想空間でロボットアームを動かしながら、動作や軌道を可視化できるため、物理的な機材が手元になくても、リアルに近い形でマニピュレーション技術を習得できます。
ロボットアームの制御を学んでみたいという方にとって、これからハードウェアの選定をする上でも役立つ内容になっています。
まとめ
ロボット開発は、センサ、制御、画像処理、推論などの各分野を横断する知識を求められます。そのため、独学では「点」としての知識は得られても、それを「線」や「面」に繋げるのが難しいという課題があります。
『ROS2とPythonで作って学ぶAIロボット入門』は、そのような断片的知識を、実践的かつ段階的に体系化してくれる1冊でした。
特に、実機がなくてもGazeboやRVizなどのシミュレーション環境で多くの技術を学べる点は、これからロボット開発にトライしてみようと思う方にとって役立つ内容かと思います。
それでは、また次の記事でお会いしましょう。








コメント