今回はロボットのホストとなるPC側でUbuntu LinuxにROS 2 Humble Hawksbillをインストールするための手順を解説します。
インストールするPCは専用機を用意するのは大変かと思いますので、今回は個人向けが無償化されたVMwareを使用しました。
これからROS2を使ってみたいと思っている方は是非参考にしてみてください。
また、Raspberry PiでのROS2のセットアップについては以下の記事で解説していますので、あわせてご覧ください。

環境
ハードウェア:VMware WORKSTATION PRO 17
OS:Ubuntu 22.04 LTS desktop
ダウンロード先
VMware
VMwareが個人利用については無償となったため、今回はVMware WORKSTATION PRO 17を使用しました。
以下のページからダウンロードできます。
Ubuntu
以下のページからubuntu-22.04.4-desktop-amd64.isoをダウンロードします。

インストール手順
ここからは実際にROS2をインストールするための手順を解説します。
VMware上のUbuntuで実行してください。
システムのアップデート
パッケージの更新を行います。
sudo apt update && sudo apt upgrade必要な依存関係のインストール
サードパーティのPPA(Personal Package Archive)を管理するためのツールです。これにより、新しいリポジトリを簡単に追加できます。
sudo apt install software-properties-commonROS 2パッケージリストを追加
universeリポジトリを有効にします。これにより、コミュニティが保守するパッケージをインストールできるようになります。
sudo add-apt-repository universe
sudo apt updateROS 2のセットアップに必要なツールをインストール
ROS 2のセットアップに必要なツールをインストールします。
sudo apt install curl gnupg lsb-releasecurl, gnupg, lsb-releaseのインストールは、ROS 2をインストールするための重要なステップです。それぞれのツールの役割と必要性について説明します。
1. curl
- 役割:
curlはコマンドラインツールで、URLからデータを取得するために使用されます。 - 必要性: ROS 2のGPGキーをダウンロードするために使用されます。具体的には、以下のコマンドでGPGキーを取得します。bashコードをコピーする
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -これにより、ROS 2のパッケージの信頼性を確認できます。
2. gnupg
- 役割:
gnupgはGNU Privacy Guardの略で、暗号化や署名、認証のために使用されるツールです。 - 必要性: ROS 2のパッケージを信頼するために必要なGPGキーを管理するために使用されます。具体的には、ダウンロードしたGPGキーをAPTキーリングに追加するために使用されます。bashコードをコピーする
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -これにより、APTがパッケージの署名を検証できるようになります。
3. lsb-release
- 役割:
lsb-releaseはLinux Standard Base (LSB)の情報を提供するツールで、ディストリビューション名やバージョン情報を取得するために使用されます。 - 必要性: ROS 2のリポジトリを正しく追加するために、システムのディストリビューションコードネームを取得する必要があります。以下のコマンドで使用されます。bashコードをコピーする
sudo sh -c 'echo "deb [arch=$(dpkg --print-architecture)] http://packages.ros.org/ros2/ubuntu $(lsb_release -cs) main" > /etc/apt/sources.list.d/ros2-latest.list'これにより、正しいディストリビューションコードネーム(例:jammy)を取得して、適切なリポジトリを設定することができます。

ROS 2のGPGキーをインポート
ROS 2のGPGキーを取得して、APTの信頼できるキーリングに追加します。
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -APTがROS 2パッケージを信頼し、正しくインストールできるようになります。GPGキーが正しく設定されていないと、パッケージのインストール時に信頼性の問題が発生し、インストールが失敗する可能性があります。
curl -sSL: 指定したURLからデータを取得します。-sはサイレントモード、-Sはエラー時にメッセージを表示、-Lはリダイレクトを許可します。apt-key add -: 標準入力からGPGキーを追加します。これにより、ROSパッケージの信頼性を確認できます。
ROS 2のリポジトリを追加
ROS 2パッケージのソースリポジトリをAPTのリストに追加します。
ROS 2のパッケージは、公式のUbuntuリポジトリには含まれていないため、ROSの公式リポジトリを追加する必要があります。これにより、APTがROS 2のパッケージを検索し、インストールできるようになります。
sudo sh -c 'echo "deb [arch=$(dpkg --print-architecture)] http://packages.ros.org/ros2/ubuntu $(lsb_release -cs) main" > /etc/apt/sources.list.d/ros2-latest.list'sh -c 'echo ...': シェルコマンドを実行します。dpkg --print-architecture: システムのアーキテクチャを表示します(例:amd64)。lsb_release -cs: ディストリビューションのコードネームを表示します(例:jammy)。/etc/apt/sources.list.d/ros2-latest.list: 新しいリポジトリ情報をこのファイルに追加します。
パッケージリストの更新
新しく追加したROS 2リポジトリを含む、パッケージリストを更新します。
sudo apt updateROS 2 Humbleデスクトップのインストール
ROS 2 Humbleのデスクトップバージョンをインストールします。これには、ROS 2のコアツールや、Rviz、Gazeboなどのシミュレーションツールが含まれます。
sudo apt install ros-humble-desktop環境設定の追加
ROS 2の設定を~/.bashrcに追加します。これにより、ターミナルを開くたびに自動的にROS 2の環境が設定されます。
echo "source /opt/ros/humble/setup.bash" >> ~/.bashrc
source ~/.bashrc開発ツールのインストール
ROS開発に必要なツール(colcon, rosdep, vcstoolなど)をインストールします。
sudo apt install ros-dev-tools環境設定の読み込み
現在のシェルセッションにROS 2の環境変数を設定します。
source /opt/ros/humble/setup.bash
実行結果
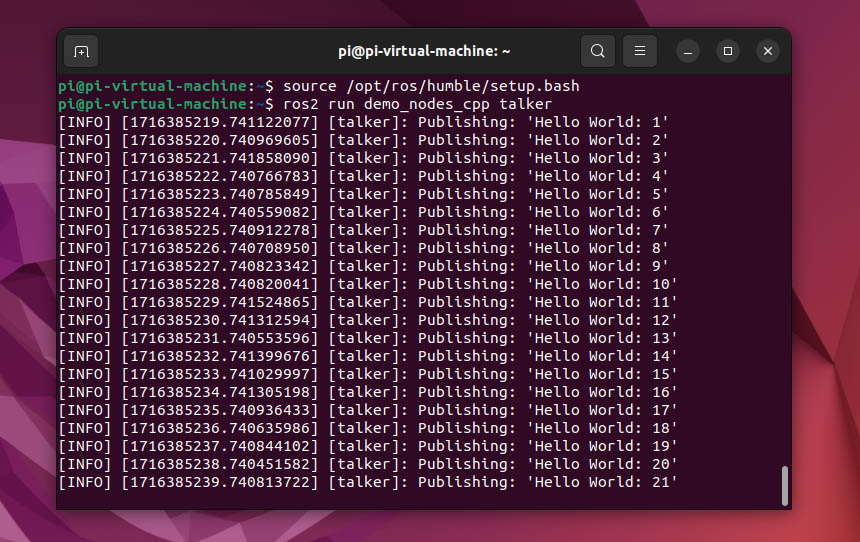
最後にROS2のデモプログラムを実行して動作確認を行います。
以下のコマンドを実行してください。
ros2 run demo_nodes_cpp talker以下のように「Hello World」のメッセージが表示されたら、ROS2が正常に動作しています。
まとめ
今回はロボットのホストとなるPC側でUbuntu LinuxにROS 2 Humble Hawksbillをインストールするための手順を解説しました。
Raspberry PiやJetsonなどのマイコンでインストールするをするのと比べると比較的簡単に導入することができました。
それでは、また次の記事でお会いしましょう。





コメント