今回はJetsonやRaspberry Piで使用できるステレオカメラを購入しましたので、レビューしていきたいと思います。
購入したステレオカメラ
今回購入したのはArducamというメーカーのOV9281イメージセンサーを搭載したカメラモジュールです。二つのカメラを使用することで写っているオブジェクトの深度センシングができるということで購入してみました。
このカメラはAmazon等では販売されておらず、スイッチサイエンスで購入しました

仕様
今回購入したカメラモジュールのスペックは以下の通りです。
出典:スイッチサイエンス
取扱説明書
メーカーのサイトでRaspberry Pi用とJetson用の取扱説明書の電子ファイルが公開されています。
Raspberry Pi
Jetson Nano
パッケージ
ここからは実際に入手したパッケージの内容を見ていきます。
箱は製品名のシールが貼ってあるのみでした。

中には本体とリボンケーブルが静電防止袋に入っていました。
紙の取扱説明書などはありませんでした。

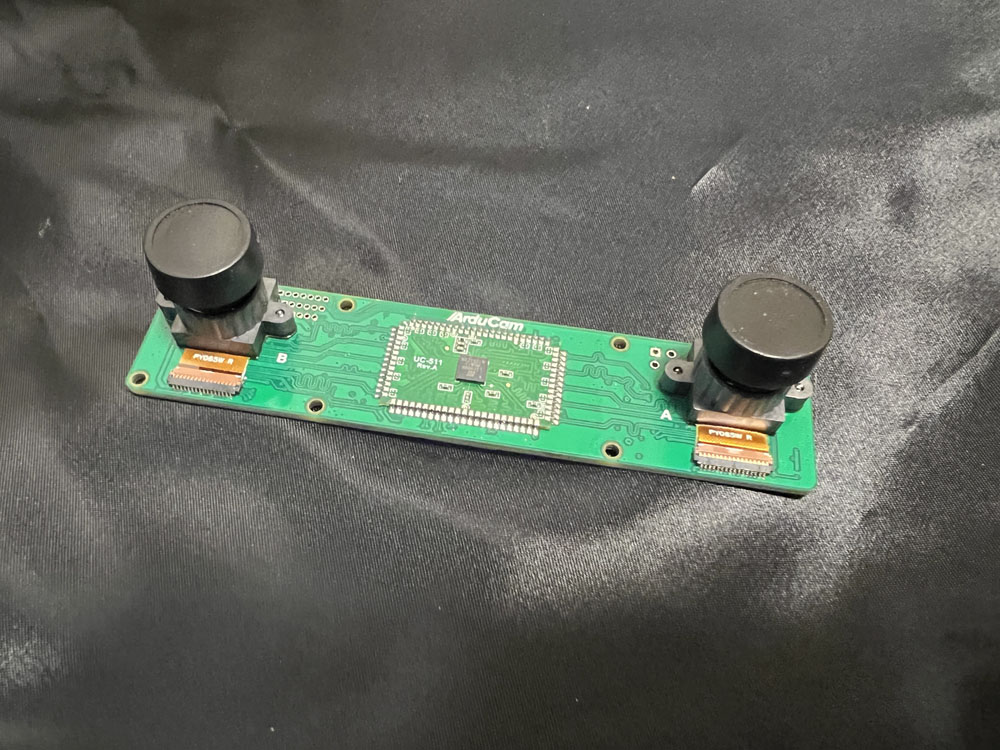
こちらがステレオカメラ本体です。基板の両端にレンズが2つ搭載されています。
レンズカバーがあるのはありがたいですね。
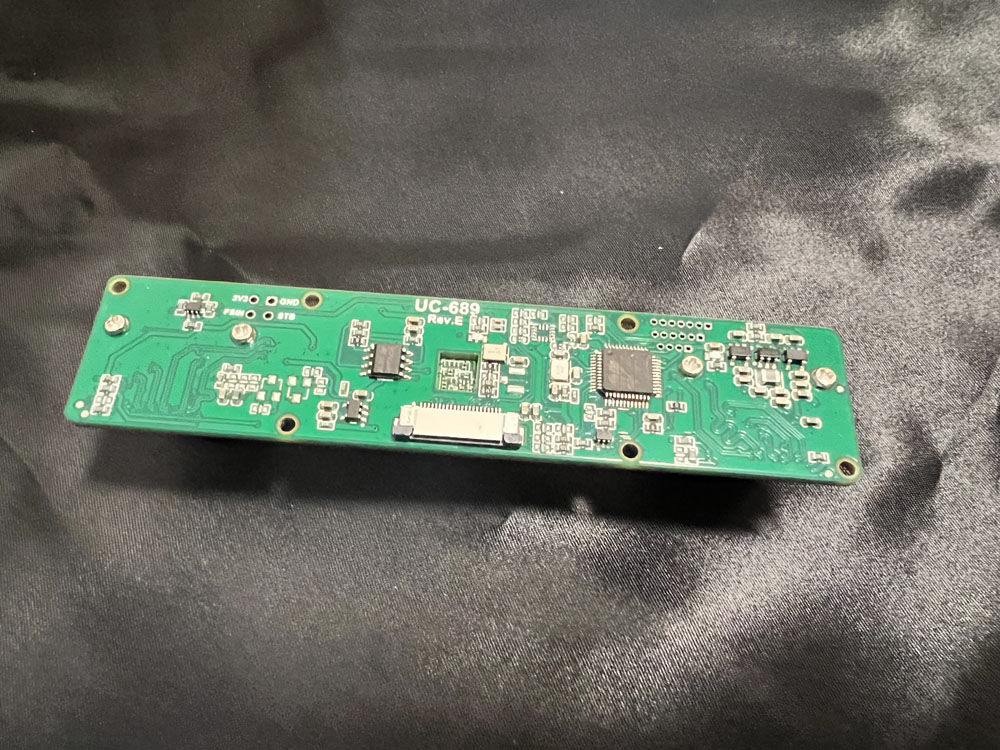
基板裏面です。UC-689という型番とハードウェアリビジョンがプリントされています。私が購入したものはRev.Eでした。
基板の下の部分の白いコネクタがケーブルを取り付ける部分です。
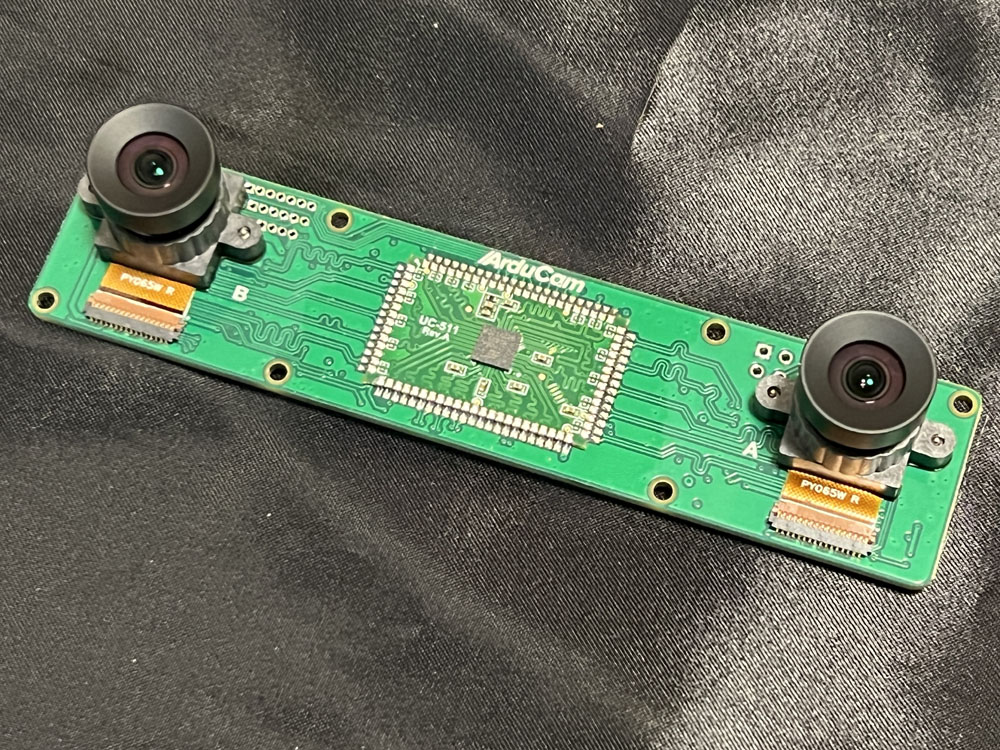
こちらがレンズを外した状態です。
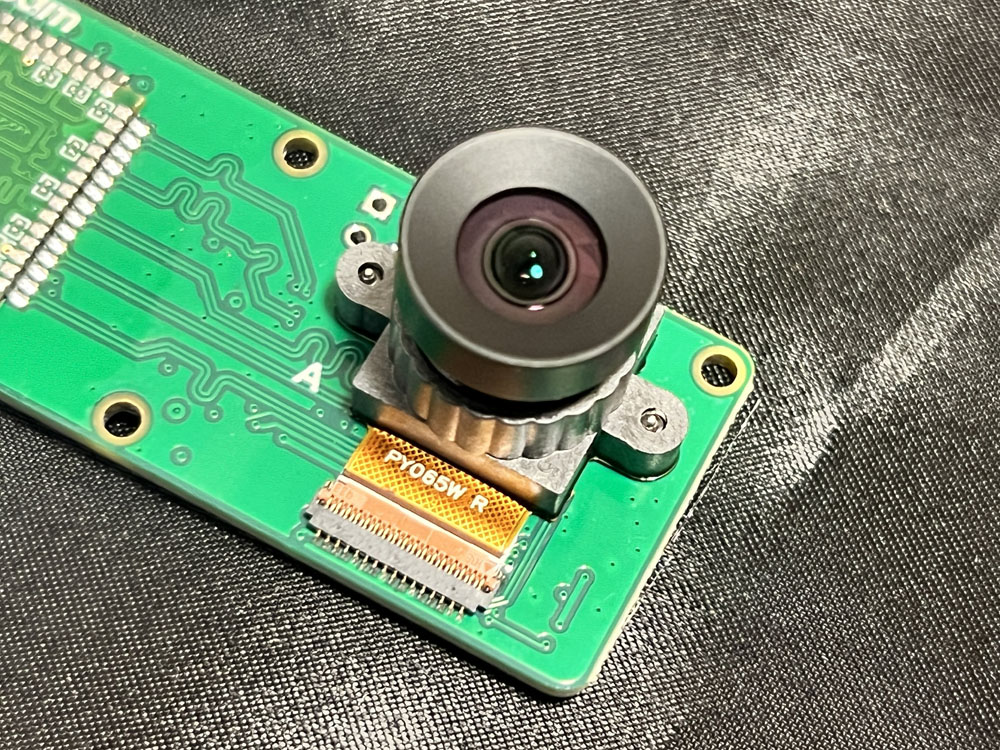
イメージセンサーOV9281を搭載したレンズ部分です。
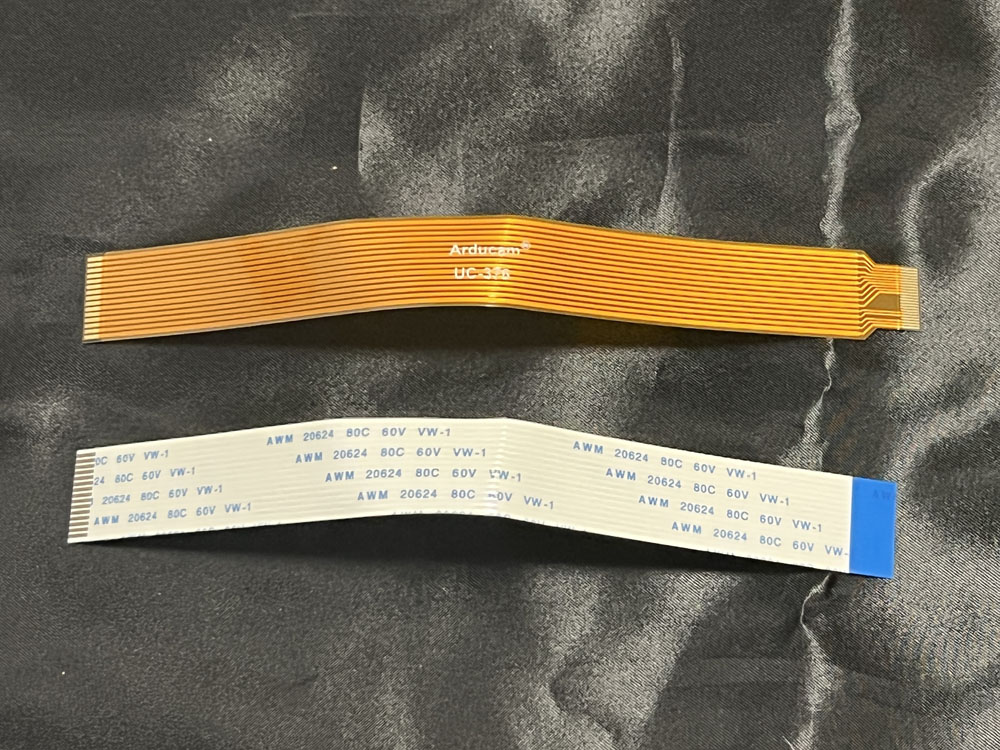
カメラとマイコンボードを接続するためのケーブルです。2種類ついていますが、私が購入したRev.Eではカメラ側のコネクタが上の茶色いケーブルしか入らない太さでした。
まとめ
今回はArducam製のステレオカメラについて解説してみました。実際にRaspberry Pi、Jetsonと接続できたらまたレポートを書く予定です。
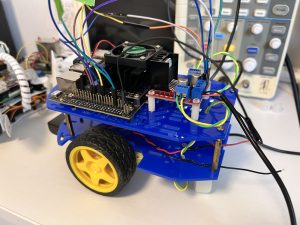
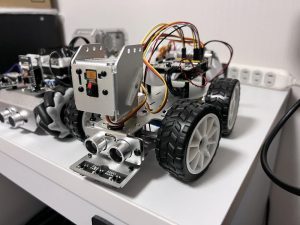
また、搭載するJetsonのロボットは以下の記事で解説しています。
それでは、また次の記事でお会いしましょう。







コメント