
こんにちは、むらさめです。
最新のRaspberry Pi 4が半導体不足の影響でなかなか届かないため、今回は過去にRaspberry Piで作ったものを紹介したいと思います。
第1回目はラズパイをコントローラにした簡易的なロボットです。
シャーシとモーター
今回紹介するロボットのベースは市販のシャーシキットを使って作ったものです。アマゾンで「DCモーター」、「シャーシ」などのキーワードで検索すると、以下のようなキットが安価で売られています。
私が使ったキットもシャーシ、タイヤ、電池ボックスだけがセットになったもので2000円~3000円程度で売られていました。使用したものは3輪でしたが、モーターで駆動するのは2輪のみです。
DCモーターを駆動するための回路を作る
キットに付属しているモータを回すには、モータードライバーとそれを駆動するための回路を作らなければいけません。このロボットで使用したのは東芝製のTA7291Pというものですが、現在は生産が終了しているようです。同じようなDCモーターを使ってみたい方は、代替品を探してみてください。
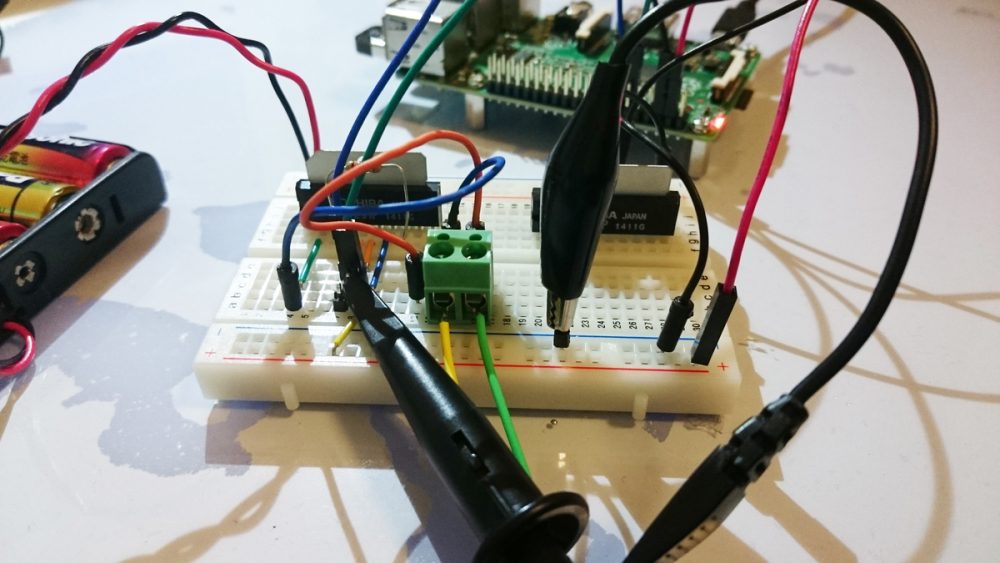
このモータードライバーは秋月電子で購入しましたが、その時は説明書にサンプルの回路図がついていましたので、それをそのままブレッドボードに実装してテストをしました。
実際にラズパイから指令を送ってモーターを回してみた動画です。
無事にモーターが回ることが確認できました。
ユニバーサル基盤の作成
回路が正しく動作することが確認できましたが、ブレッドボードのままだと振動などで部品が外れてしまうことがあります。そのため、以下のようなユニバーサル基板ではんだ付けをして回路を作成していきます。
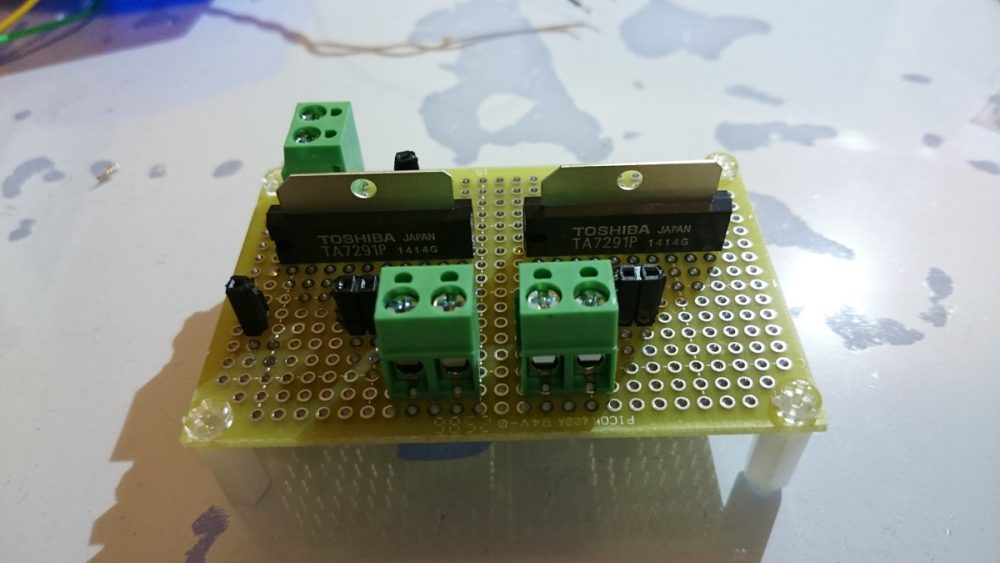
私もはんだ付けはかなり下手なので、仕上がりはきれいではありませんが写真のように実装しました。基板の上には部品と端子台のみがつくようにして、はんだ付けは背面で行っています。
シャーシに組み付ける
モータードライバーの回路ができたら、それぞれのパーツをシャーシに組み付けていきます。この手のキットはシャーシにスペーサーを固定する溝がたくさんあけてあるので、適当に合いそうな位置に固定していきます。
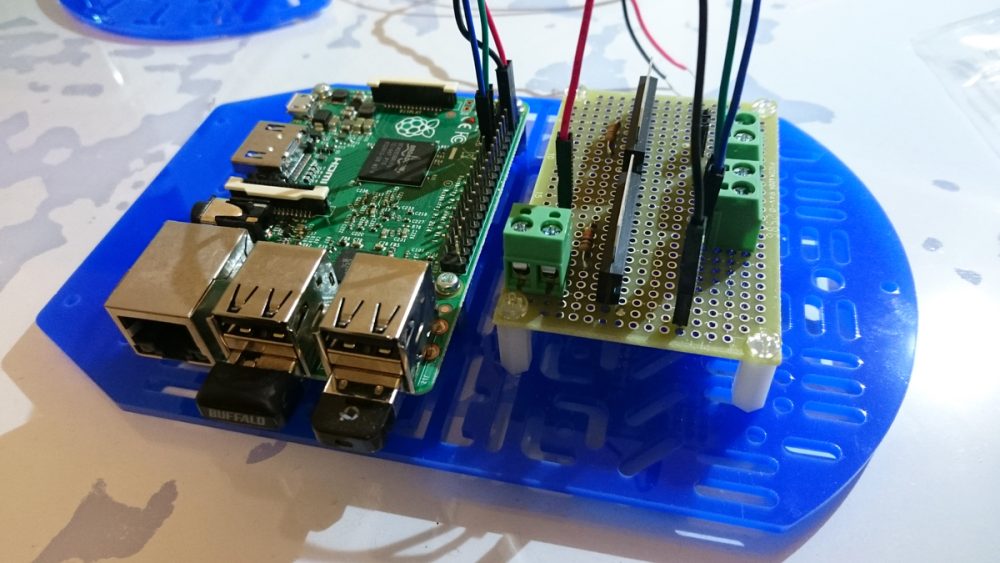
基板を固定したら、ジャンパーケーブルで配線していきます。
走行テスト
最後に走行テストをしている動画です。この時はスマホをコントローラーにしてロボット側で指令値をイーサネット経由でソケット通信で受け取りモーターをコントロールしていました。
まとめ
簡易的なキットですが、ラズパイと組み合わせることでラジコンカーのようなロボットを作ることができました。このロボットの発展形ではラメラを取り付けたものも作成しましたので、それはまた別の記事で紹介したいと思います。
それでは、また次の記事でお会いしましょう。











コメント